Mi az a szinkron motor és hol használják?
A szinkron villamos motorok (SD) nem olyan gyakoriak, mint az aszinkron mókuskerekes motorok. De azokat használják, ahol nagy nyomaték szükséges, és a munka során gyakran túlterhelés. Az ilyen típusú motorokat akkor is használják, ahol nagy teljesítményre van szükség a mechanizmusok hajtásához, mivel a nagy teljesítménytényező és a hálózat teljesítménytényezője javítható, ami jelentősen csökkenti a villamos energia költségeit és a vonal terhelését. Mi az a szinkron motor, hol használják, és milyen előnyei és hátrányai vannak, ebben a cikkben megvizsgáljuk.
Meghatározás és a cselekvés elve
Egyszerűen fogalmazva, egy szinkronmotorot olyan elektromotornak nevezzük, amelynek a forgórész (tengely) fordulatszáma egybeesik az állórész mágneses mezőjének forgási sebességével.
Röviden nézzük meg egy ilyen villanymotor működési elvét - ez a forgó állórész mágneses mezőjének kölcsönhatásán alapszik, amelyet általában háromfázisú váltakozó áram és a rotor állandó mágneses mezője hoz létre.
A forgórész állandó mágneses mezőjét gerjesztő tekercs vagy állandó mágnes hozza létre. Az állórész tekercseiben lévő áram forgó mágneses teret hoz létre, míg a működési módban lévő rotor állandó mágnes, pólusai az állórész mágneses mezőjének ellentétes pólusaihoz rohannak. Ennek eredményeként a forgórész szinkronban forog az állórész mezőjével, ami fő jellemzője.
Emlékezz erre indukciós motor az állórész MP fordulatszáma és a forgórész fordulatszáma különbözik a csúszás mértékétől, és mechanikai tulajdonságai „csúsznak” egy csúccsal a kritikus csúszás alatt (a névleges forgási sebesség alatt).
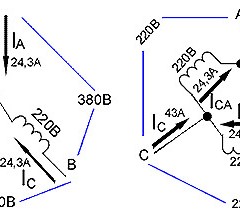
Az állórész mágneses tere forgásának sebessége a következő egyenlettel kiszámítható:
N = 60f / p
f az áram frekvenciája a tekercsben, Hz, p a póluspárok száma.
Ennek megfelelően a szinkron motor tengelyének fordulatszámát ugyanazzal a képlettel kell meghatározni.
A legtöbb, a termelésben használt váltóáramú villanymotor állandó mágnes nélkül készül, de gerjesztő tekercseléssel, míg az alacsony teljesítményű szinkron váltóáramú motorokat állandó rágómágnesekkel készülnek.
Az áramot a tekercseléshez gyűrűk és kefe-egység biztosítja. A kollektoros villanymotorral ellentétben, ahol a kollektort (hosszirányban elrendezett lemezek sorozatát) használják az áram továbbítására egy forgó tekercsre, a gyűrűket szinkronban kell felszerelni az állórész egyik végén.
A tirisztor gerjesztők, amelyeket gyakran "VTE" -nek hívnak (az ilyen háztartási készülékek sorozatának egyikének neve), jelenleg a közvetlen áram gerjesztésének forrása.Korábban a generátor-motor gerjesztő rendszert használták, amikor egy generátort a motorral azonos tengelyre telepítettek (ez szintén gerjesztő), amely ellenállások alkalmazott áram a tekercseléshez.
Szinte az összes szinkron egyenáramú motor forgórészét gerjesztési tekercs nélkül hajtják végre, és állandó mágnesekkel működnek, noha elvileg hasonlítanak az AC LED-ekhez, azonban nagyon különböznek egymással kapcsolatban, és a klasszikus háromfázisú gépek vezérlése szempontjából.
Az elektromos motor egyik fő jellemzője a mechanikai jellemző. Szinkronmotorjait egyenes vízszintes vonalhoz közel tartja. Ez azt jelenti, hogy a tengely terhelése nem befolyásolja a sebességét (amíg el nem éri a kritikus értéket).
 aszinkron és b) szinkron motorok mechanikai jellemzői")
Ezt pontosan az egyenáram gerjesztésének köszönhetően érik el, ezért a szinkron villamos motor tökéletesen fenntartja állandó fordulatokat változó terhelések, túlterhelések és feszültségcsökkenések alatt (egy bizonyos határig).
Az alábbiakban látható a szimbólum a szinkrongép diagramján.

A rotor kialakítása
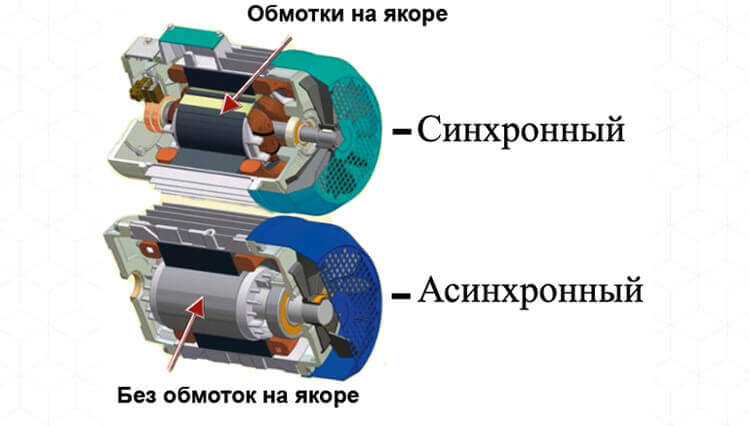
Mint minden más, a szinkron villamos motor két fő részből áll:
- Állórész. A tekercsek benne vannak. Horgonynak is hívják.
- Rotor. Állandó mágnesek vagy gerjesztő tekercs vannak rá felszerelve. Induktornak is nevezik, mert célja - mágneses mező létrehozása).
A tekercselés áramának biztosításához 2 gyűrűt kell felszerelni a forgórészre (mivel a gerjesztés egyenárammal történik, egyikükhöz „+”, a másikhoz „-” betáplálást biztosítunk). A kefék a kefetartóhoz vannak rögzítve.

A szinkron váltóáramú motorok forgórészét a felhasználástól függően kétféle típusú lehet:
- Kifejezetten poláris. A pólusok (tekercsek) jól láthatók. Használjon alacsony sebességen és nagy számú pólusnál.
- Implicit - kereknek tűnik, abban a nyílásban, amelyre a tekercsek huzaljai vannak fektetve. Használjon nagy fordulatszámon (3000, 1500 fordulat / perc) és kis számú pólusnál.

Szinkron motorindítás
Az ilyen típusú elektromos gépek egyik jellemzője, hogy nem lehet egyszerűen csatlakoztatni a hálózathoz, és várni a beindítását. Ezenkívül a LED működéséhez nemcsak a gerjesztő áram forrására van szükség, hanem meglehetősen bonyolult indítási áramkörrel is rendelkezik.

Az indítás ugyanúgy történik, mint egy indukciós motornál, és egy indítási momentum létrehozása érdekében a tekercselésen kívül egy további rövidre rövidített „mókuskos ketrec” tekercset helyeznek a rotorra. „Csillapító” tekercsnek is hívják, mert növeli a stabilitást hirtelen túlterheléseknél.
A gerjesztő áram a forgórész tekercselésekor nincs, és amikor egy szinkron sebességre gyorsul (3-5% -kal kevesebb, mint a szinkron), akkor gerjesztési áramot alkalmazunk, amely után az oszlop és az állórész áram oszlik, a motor szinkronizmusba lép és működési módba lép.
A nagy teljesítményű gépek indítási áramának korlátozása érdekében néha csökkentik a feszültséget az állórész tekercseinek kapcsán egy autotranszformátor vagy ellenállások soros csatlakoztatásával.
Amíg a szinkrongép aszinkron módban indul, ellenállások vannak csatlakoztatva a tekercshez, amelynek ellenállása 5-10-szer meghaladja a tekercs ellenállását. Ez azért szükséges, hogy az indítás közben a tekercsben indukált áramok hatására fellépő pulzáló mágneses fluxus ne lassítsa le a gyorsulást, és azért is, hogy ne rongáljuk meg a tekercseket az abban indukált emf miatt.
típusok
Sok ilyen típusú gép létezik, a szinkron váltakozó áramú motor kialakítását a tekercsekkel, mint a gyártásban leggyakrabban leírtuk. Vannak más típusok is, például:
- Állandó mágneses szinkronmotorok. Ezek különféle villamos motorok, például PMSM - állandó mágneses szinkron motor, BLDC - kefe nélküli egyenáram és mások. A vezérlő módszer és az áram alakja közötti különbségek (szinuszos vagy trapéz alakú). Ezeket kefe nélküli vagy kefe nélküli motoroknak is nevezik.Szerszámgépekben, rádióvezérelt modellekben, szerszámgépekben stb. Nem közvetlenül egyenáramból működnek, hanem egy speciális átalakítón keresztül.
- Léptetőmotorok - szinkron, kefe nélküli motorok, amelyekben a forgórész pontosan megtartja a megadott helyzetet. A szerszám elhelyezése a CNC-gépekben és az automatikus rendszerek különböző elemeinek vezérlésére szolgál (például a fojtószelep helyzete az autóban). Állórészből állnak, ebben az esetben gerjesztési tekercsek vannak rajta, és egy rotorból, amely mágnesesen puha vagy mágnesesen kemény anyagból készül. Szerkezetileg nagyon hasonló az előző típusokhoz.
- Reaktív.
- Hysteresis.
- Reaktív hiszterézis.
Az utolsó három típusú LED-nek szintén nincs kefe, ezek a forgórész speciális kialakítása miatt működnek. A reaktív LED-ek a tervek háromát különböztetik meg: egy keresztirányban rétegelt rotor, a különálló pólusú rotor és egy tengelyirányban rétegzett rotor. Munkájuk elvének magyarázata meglehetősen bonyolult, és nagy összeget igényel, ezért kihagyjuk. Az ilyen motorok a gyakorlatban valószínűleg ritkán találkoznak. Ezek elsősorban az automatizálásban használt alacsony fogyasztású gépek.

Alkalmazási kör
A szinkronmotorok drágábbak, mint az aszinkronok, emellett további egyenáram gerjesztésre van szükségük - ez részben csökkenti az ilyen típusú elektromos gépek alkalmazási körének szélességét. A szinkron villamos motorokat azonban olyan mechanizmusok hajtására használják, ahol lehetséges túlterhelés, és a stabil fordulatok pontos fenntartása szükséges.

Sőt, ezeket leggyakrabban a nagy kapacitások területén használják - több száz kilovatt és egység megawatt értékkel, ugyanakkor az indítás és a leállítás meglehetősen ritka, vagyis a gépek hosszú ideig éjjel-nappal működnek. Ez az alkalmazás annak a ténynek köszönhető, hogy a szinkrongépek 1-nél közeli cos Ф phi-kel működnek, és reaktív energiát szállíthatnak a hálózatra, ami javítja a hálózat teljesítménytényezőjét és csökkenti annak fogyasztását, ami a vállalkozások számára fontos.
Előnyök és hátrányok
Egyszerű szavakkal, akkor minden elektromos autónak megvannak az előnyei és hátrányai. A szinkronmotor előnyei a következők:
- Ha a cos Фи = 1-rel dolgozik, akkor az egyenáramú gerjesztés miatt a hálózatból nem fogyasztanak reaktív energiát.
- Működés közben, túlzott túlteljesítéssel, reaktív energiát adnak a hálózatnak, javítva a hálózat teljesítménytényezőjét, a feszültség csökkenését és veszteségeit, és növekszik az erőművek generátorainak CM.
- A LED tengelyén kifejtett maximális nyomaték arányos az U-val és az AD-U²-vel (a feszültség kvadratikus függése). Ez azt jelenti, hogy a LED-nek jó terhelhetősége és stabilitása van, amely megmarad a hálózat feszültségcsökkenésekor.
- Mindezek következtében a forgási sebesség stabil a túlterhelések és a süllyedés során, a túlterhelési kapacitáson belül, különösen a növekvő gerjesztési áram mellett.
A szinkronmotor jelentős hátránya azonban, hogy a kialakítása bonyolultabb, mint a rövidzárlati forgórészű aszinkron esetében, gerjesztőre van szükség, amely nélkül nem tud működni. Mindez magasabb költségeket eredményez az aszinkron gépekhez képest, valamint a karbantartás és üzemeltetés nehézségeit.
A szinkronmotorok előnyei és hátrányai talán ezzel végződnek. Ebben a cikkben megpróbáltuk összefoglalni a szinkronmotorokkal kapcsolatos általános információkat. Ha van valami, amely kiegészíti az anyagot - írja meg a megjegyzéseket.
Kapcsolódó anyagok: