Mi az indukciós motor és hogyan működik?
Az indukciós motor egyszerű és megbízható, ezért nagyon gyakran használják a gyártásban és a háztartási készülékekben, a szelephajtástól a dob forgatásáig a mosógépben. Ebben a cikkben egyszerű szavakkal mondjuk el, hogy mi az aszinkron elektromos motor, mi ez és hogyan működik az ilyen típusú elektromos gépek.
típusok
Az indukciós motorokat (AM) két fő csoportra osztják:
- mókus ketrec rotor
- fázisrotorral.
Ha elhagyjuk az árnyalatokat, akkor az a különbség, hogy a mókuskerekes rotormotor nem rendelkezik kefékkel és kifejezett tekercsekkel, kevésbé igényel karbantartást. Míg a fázisrotorral rendelkező aszinkron motorokban három tekercs van csatlakoztatva a csúszógyűrűkhez, amelyből az áramot kefék távolítják el. Az előzőtől eltérően, jobb a tengely nyomatékának szabályozása, és könnyebb megvalósítani a zökkenőmentes áramok csökkentésének zökkenőmentes indítását.
A többi motor a következő osztályba tartozik:
- a betáplálási fázisok száma szerint - egyfázisú és kétfázisú (a mindennapi életben egy 220 V-os hálózatról való tápfeszültség mellett) és a háromfázisú (a gyártásban és a műhelyekben legszélesebb körben használt)
- rögzítés útján - karimán vagy mancsokon.
- üzemmód szerint - hosszú, rövid vagy ismételten rövid távú üzemmódra.
És számos egyéb tényező, amelyek befolyásolják egy adott termék kiválasztását meghatározott körülmények között történő felhasználásra.
Sokat lehet mondani az egyfázisú villanymotorokról: néhányuk kondenzátoron indul, mások indítási és üzemi kapacitást igényelnek. Vannak olyan lehetőségek rövidzárlatú fordulattal is, amelyek kondenzátor nélkül működnek, és például páraelszívókhoz használhatók. Ha érdekli, írja meg a megjegyzéseket, és erről írunk egy cikket.
Eszköz
Meghatározása szerint az „aszinkron” egy olyan váltakozó áramú motorra utal, amelyben a forgórész lassabban forog, mint az állórész mágneses tere, azaz aszinkron módon. De ez a meghatározás nem túl informatív. A megértéshez kitalálnia kell, hogy ez a motor hogyan lett kialakítva.
Az indukciós motor, mint bármely más, két fő részből áll - forgórész és állórész. Az elektromosság „a bábuk számára” megfejteni:
- Az állórészt bármilyen generátor vagy villamos motor rögzített részének hívják.
- A rotorot a motor forgó részének nevezik, amely a mechanizmusokat hajtja.

Az állórész egy házból áll, amelynek végei csapágyvédőkkel vannak bezárva, amelyekbe a csapágyak be vannak építve. A motor rendeltetésétől és teljesítményétől függően csúszó- vagy gördülőcsapágyakat használnak. A magot a tokban kell elhelyezni, rá vannak szerelve egy tekercs. Stator tekercselésnek hívják.

Mivel az áram váltakozik, hogy csökkentsék a kóbor áramok okozta veszteségeket (Foucault-áramok) az állórész magját vékony acéllemezekből húzzák ki, amelyeket egymástól skálán választanak el, és lakkkal ragasztják.Az állórész tekercseihez tápfeszültséget táplálnak, és az azokban áramló áramot stator áramnak nevezik.
A tekercselések száma az ellátási fázisok számától és a motor tervezésétől függ. Tehát egy háromfázisú motornak legalább három tekercselése csillag vagy háromszög sémával van összekapcsolva. Számuk lehet nagyobb, és ez befolyásolja a tengely forgási sebességét, de erről később beszélünk.
De a forgórésznél a dolgok sokkal érdekesebbek, ahogy már említettük, lehet rövidzárlat vagy fázis.

A mókuskerekes rotor fémrudak (általában alumínium vagy réz) sorozatát képezik, a fenti ábrán a 2-es szám jelöli őket, megforrasztva vagy kitöltve a magot (1), gyűrűkkel (3) zárva. Ez a kialakítás olyan kerékre emlékeztet, amelyen háziasított rágcsálók futnak, ezért gyakran nevezik „mókusketrecnek” vagy „mókuskeréknek”, és ez a név nem szleng, hanem nagyon irodalmi. Az EMF magasabb harmonikus értékeinek és a mágneses mező pulzációjának csökkentése érdekében a rudakat nem a tengely mentén, hanem egy bizonyos szögben fektetik a forgás tengelyéhez képest.
A fázisrotor abban különbözik az előzőtől, hogy már van három tekercselése, mint egy állórésznél. A tekercselések kezdetét a gyűrűkhöz kötik, általában rézből, azokat a motor tengelyére nyomják. Később röviden elmagyarázzuk, miért van szükségük rájuk.

Mindkét esetben a tengely egyik vége egy mozgással hajtott mechanizmussal van összekötve, kúpos vagy hengeres alakú, hornyokkal vagy anélkül, hogy peremet, szíjtárcsát és más mechanikus hajtó alkatrészeket szereljen be.
A tengely „hátsó” részére egy járókerék van rögzítve, amely a fúváshoz és a hűtéshez szükséges; a háznak a járókerék felett egy burkolatot kell elhelyezni. Így a hideg levegő az indukciós motor szélei mentén irányul, ha ez a járókerék valamilyen okból nem forog, akkor túlmelegszik.

Az első indukciós motor kialakítását M.O. Dolivo-Dobrovolsky 1889-ben szabadalmaztatta. Bármilyen változás nélkül megmaradt a mai napig.
Működés elve
Az aszinkron elektromos gépeket gyakran indukciónak nevezik, ennek oka működésük. Bármelyik elektromos motort forgatni kell a rotor és az állórész mágneses tereinek kölcsönhatása eredményeként, valamint az Ampere erőnek köszönhetően. A mágneses mező viszont létezhet egy állandó mágnes körül vagy egy vezető körül, amelyen keresztül áram áramlik. De hogyan működik pontosan egy aszinkron gép?
Az indukciós motorban, másoktól eltérően, nincs tekercselés mint olyan, míg mágneses mezővel rendelkezik? A válasz egyszerű: az indukciós motor egy transzformátor.
Fontolja meg működésének elvét egy háromfázisú gép példáján, mivel éppen ezeket találják meg gyakrabban, mint mások.
Az alábbi ábrán látható a tekercsek elhelyezkedése a háromfázisú aszinkron motor statormagján.

A háromfázisú áram áramlása eredményeként forgó mágneses mező jelenik meg az állórész tekercseiben. A fáziseltolódás miatt az áram akár az egyik, akár a másik tekercset áramolja, ennek megfelelően van egy mágneses mező, amelynek pólusai a jobb kéz szabálya szerint vannak irányítva. És az egy vagy másik tekercsben zajló áramváltozásnak megfelelően a pólusokat a megfelelő irányba továbbítják. Ahogy a következő animáció illusztrálja:

A legegyszerűbb (kétpólusú) esetben a tekercseket oly módon rakják egymásba, hogy mindegyiket 120 fokkal eltolják az előzőhöz képest, ahogyan a váltakozó áramú hálózat feszültségének fázisszöge.
Az állórész mágneses tere forgási sebességét szinkronnak nevezzük. Tudjon meg többet arról, hogyan forog, és miért tanul a következő videóból. Vegye figyelembe, hogy a kétfázisú (kondenzátoros) és az egyfázisú motorokban nem forog, hanem ellipszis alakú vagy pulzáló, és a tekercsek nem 3, hanem 2.
Ha egy aszinkron motort vesszünk figyelembe egy mókuskerekes rotorral, akkor az állórész mágneses tere EMF-t indukál rúdjaiban, mivel azok zárva vannak, akkor áram áramlik.Emiatt mágneses mező is előfordul.
Két mező és a mező kölcsönhatásának eredményeként Ampere erőa forgórészre hatva elindul, és az állórész forgó mágneses tere után forog, de mindig kissé elmarad az MP állórész forgási sebességétől, ezt a késést csúszásnak nevezik.
Ha a mágneses mező forgási sebességét szinkronnak nevezzük, akkor a forgórész forgási sebessége már aszinkron, ahonnan ezt a nevet kapta.
A fázisrotorral ellátott AD esetén a dolgok hasonlóak, azzal a különbséggel, hogy a gyűrűkhöz egy reostata van csatlakoztatva, amelyet a motor üzemmódba lépésével eltávolítják az áramkörből és a tekercsek rövidzárlatot képeznek. Ezt az alábbi ábra szemlélteti, de a reostata helyett állandó ellenállásokat használnak, csatlakoztatnak vagy elcsatolnak a KM3, KM2, KM1 kontaktorok.
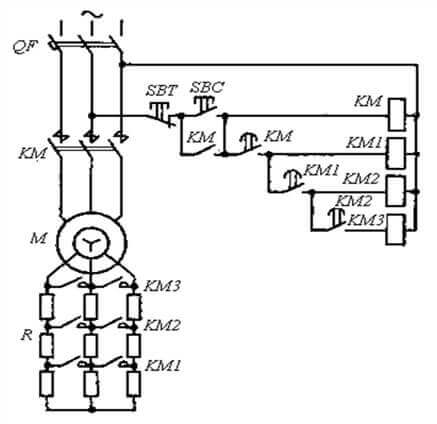
Ez a megközelítés lehetővé teszi a sima indítást és a behatolási áram csökkentését, a rotor aktív elektromos ellenállásának növelésével.
 Összefoglalni:
Összefoglalni:
- Az állórész tekercseiben lévő áram mágneses teret generál.
- A mágneses mező áramot okoz a forgórészben.
- A forgórészben lévő áram miatt egy mező jelenik meg körülötte.
- Mivel az állórész tere miatt forog, a forgórész mögött forogni kezd.
Csúszás és forgási sebesség
Az állórész mágneses tere (n1) forgási frekvenciája nagyobb, mint a rotor forgási frekvenciája (n2). A köztük levő különbséget csúszásnak nevezik, amelyet S latin betűvel jelölnek és a következő képlettel számítanak:
S = (n1-n2) * 100% / n1
A csúszás nem hátránya ennek az elektromotornak, mert ha tengelye ugyanolyan frekvenciával forog, mint az állórész mágneses tere (szinkron), akkor a rudakban nem jelenik meg áram, és egyszerűen nem forog.
Most egy fontosabb koncepcióról - az indukciós motor forgórészének fordulatszámáról. 3 értéktől függ:
- tápfeszültség frekvencia (f);
- a mágneses pólusok párok száma (p);
- csúszás (S).
A mágneses póluspárok száma meghatározza a mező szinkron forgási sebességét, és az állórész tekercsek számától függ. A csúszás az adott villamos motor terhelésétől és kivitelétől függ, és 3-10% tartományban van, vagyis az aszinkron sebesség valamivel kisebb, mint a szinkron. Nos, a váltakozó áram frekvenciáját 50 Hz-en rögzítik.
Ezért az indukciós motor tengelyének fordulatszámát nehéz szabályozni, csak a hálózati frekvenciát befolyásolhatja, azaz frekvenciaváltó. Lehetséges az állórész feszültségének csökkentése, de ekkor a tengely teljesítménye csökken, mindazonáltal ezt a technikát alkalmazzák az AM indításához, amikor a tekercset csillagról deltara állítják át, hogy csökkentsék a behatolási áramot.
Az állórész mező forgási gyakoriságát (szinkron sebesség) a következő képlet határozza meg:
n = 60 * f / p
Tehát egy motorban, amelyben egy pár mágneses pólus (két pólus) van, a szinkron sebesség:
60 * 50/1 = 3000 fordulat / perc
Az elektromos motorok leggyakoribb lehetőségei:
- egy pár pólus (3000 fordulat / perc);
- kettő (1500 fordulat / perc);
- három (1000 fordulat / perc);
- négy (750 fordulat / perc).
A tényleges fordulatszám kissé alacsonyabb lesz, valódi indukciós motoron például az adattáblán van feltüntetve, itt - 2730 ford / perc. Ennek ellenére az emberek ilyen aszinkron motort hívnak szinkron sebesség vagy egyszerűen „három ezer méter” szerint.

Akkor a csúszása megegyezik:
3000-2730*100%/3000=9%
Hatály
Az aszinkron elektromos motor az emberi tevékenység minden területén alkalmazható. Azok, amelyek egyfázisú (220 V-os feszültség alatt állnak), alacsony fogyasztású szelepmozgatókban vagy háztartási készülékekben és szerszámokban találhatók, például:
- "baba" típusú mosógépben és más régi szovjet modellekben;
- betonkeverőben;
- a ventilátorban;
- gettóban;
- és még a felső árszekció fűnyíróinál is.



Háromfázisú hálózatokban történő gyártáskor:
- automatikus szelepek;
- emelőszerkezetek (daruk és csörlők);
- szellőzés;
- kompresszorok;
- szivattyúk
- fa- és fémmegmunkáló gépek és így tovább.




Az AD-t elektromos járművekben is használják, és az utóbbi időben aktívan hirdetik az interneten a Slavyanka típusú tekercseléssel ellátott aszinkron motort és az úgynevezett Duyunov motorkerékpárt, amelyet megtudhat a fejlesztő videójában.
Az aszinkron motorok hatóköre annyira hatalmas, hogy önmagában a lista hosszabb lesz, mint ebben a cikkben, tehát minden villanyszerelőnek tudnia kell, hogyan működik, mi a célja és hol használható. Összegzés és felsorolás ezen eszközök előnyeiről és hátrányairól.
Előnyök:
- Egyszerű felépítés.
- Alacsony költségű.
- Szinte nincs karbantartás.
A fő hátrány a sebesség beállításának nehézsége ugyanazon egyenáramú motorokhoz vagy univerzális kollektorgépekhez képest. Ennek megfelelően nehéz megszervezni a nagy gépek zökkenőmentes indítását, és ezt általában drága frekvenciaváltóval kell megtenni.
Ezzel fejezzük be az indukciós motorok és azok hatályának megfontolását. Reméljük, hogy a cikk elolvasása után megérti, mi ez és hogyan működik ez az elektromos gép!
Kapcsolódó anyagok:




