Mi az a kefe nélküli DC motor, hogyan épül fel és működik?
Meghatározás
A kefe nélküli DC motort egyenáramú motornak nevezzük, amelynek tekercseiben az áramot egy speciális kapcsolóberendezés kapcsolja - „meghajtónak” vagy „inverternek” hívják, és ezek a tekercsek mindig az állórészen vannak. A kapcsoló 6 tranzisztorból áll, amelyek a forgórész helyzetétől függően áramot szolgáltatnak egy adott tekercshez.
A hazai szakirodalomban az ilyen motorokat „szelepnek” hívják (mivel a félvezető kapcsolókat „szelepeknek” hívják), és az ilyen elektromos gépeket két típusra osztják ellen-EMF formájában. A külföldi irodalomban ez a különbség fennáll, az egyiket az orosz „BLDC” -hez (kefe nélküli egyenáramú meghajtó vagy motor) analóg módon hívják, amely szó szerint „kefe nélküli DC motor” -nak hangzik a tekercsekben, trapéz alakú EMF jelenik meg. A szinuszos EMF-rel rendelkező szelepmotorokat PMSM-nek (állandó mágneses szinkrongépnek) nevezzük, amely "szinkron elektromotorként fordul, állandó mágnesek gerjesztésével".
Az eszköz és a működés elve
A KDPT-ben található kollektor csomópontként szolgál az armatúra tekercsek áramának kapcsolására. Egy kefe nélküli DC motorban (BDT) ezt a szerepet nem a lamellás kefék, hanem a félvezető kapcsolók - tranzisztorok kommutátora játssza. A tranzisztorok az állórész tekercseit kapcsolják, létrehozva egy forgó mágneses teret, amely kölcsönhatásba lép a rotor mágneses mezőjével. És amikor az áram átfolyik egy vezetőn, amely egy mágneses mezőben van, akkor rá hat Ampere erőennek az erőnek a hatására nyomaték jön létre az elektromos gépek tengelyén. Ezen alapszik minden villamos motor működési elve.
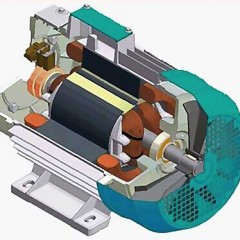
 és a kefe nélküli motor (jobb) kialakítása")
Most kitaláljuk, hogyan működik a kefe nélküli motor. A 3 tekercs általában a BDPT állórészen helyezkedik el, analóg módon a váltakozó áramú motorokkal gyakran háromfázisúnak nevezik. Ez részben igaz: a kefe nélküli motorokat egyenáramú áramforrás táplálja (gyakran akkumulátorokból), de a vezérlő felváltva kapcsolja a tekercseket. Nem teljesen igaz azonban azt mondani, hogy váltakozó áram áramlik a tekercseken. A tápfeszültség tekercsének végső alakját téglalap alakú tranzisztor vezérlő impulzusok képezik.
A háromfázisú kefe nélküli motor három- vagy négyvezetékes lehet, ahol a negyedik huzal egy csap a középpontból (ha a tekercsek egymáshoz vannak csatlakoztatva) csillag mintázat).

A tekercselések vagy egyszerű szavakkal a rézhuzal tekercsek illeszkednek az állórész magjába. A hajtás kivitelétől és rendeltetésétől függően az állórésznek különböző számú foga lehet. Különböző lehetőségek vannak a fázistekercsek elosztására a forgórész fogai mentén, amelyet a következő ábra szemléltet.

Az egyes fogak tekercseit egy fázisban sorba vagy párhuzamosan lehet kapcsolni, attól függően, hogy a tervező milyen erővel és a tervezett hajtás pillanatával rendelkezik -, és maguk a fázistekercsek egymáshoz vannak kapcsolva egy csillag vagy háromszög mintázatának megfelelően, pl. aszinkron vagy egyidejű háromfázisú váltóáramú motorok.

A rotor helyzetérzékelőit be lehet szerelni az állórészbe. A csarnokérzékelőket gyakran használják, és jeleket adnak a vezérlőnek, amikor a rotormágnesek mágneses tere hatással van rájuk. Ez azért szükséges, hogy a vezérlő „tudja”, hogy a forgórész milyen helyzetben van, és táplálja a megfelelő tekercseket. Ez szükséges a munka hatékonyságának és stabilitásának növeléséhez, és röviden: a motor teljes energiájának kiszorításához. Az érzékelők általában 3 darabot telepítettek. De az érzékelők jelenléte megnehezíti a kefe nélküli motor eszközét, további vezetékeket kell vezetniük az áram- és az adatvezetékekhez.

A BDTT-ben a rotorra szerelt állandó mágneseket gerjesztik, az állórész pedig egy horgony. Emlékezzünk arra, hogy a kollektorgépekben fordítva van (a forgórész egy horgony), és a CD-ben való gerjesztéshez mind állandó mágneseket, mind elektromágneseket (tekercseket) használnak.
A mágneseket váltakozó pólusokkal szerelik fel, és ennek megfelelően számuk meghatározza a póluspárok számát. De ez nem azt jelenti, hogy hány mágnes, akkor annyi pár pólus. Több mágnes alkothat egy pólt. A percenkénti fordulatok száma a pólusok számától függ, mint az indukciós motor esetén (és másokkal). Vagyis ugyanazon beállítások egyik vezérlőjéből az eltérő számú póluspárral rendelkező kefe nélküli motorok különböző sebességgel forognak.

A BDTT típusai
Most nézzük meg, milyenek az ecset nélküli állandó mágneses motorok. Ezeket az ellenáram-EMF alakja, kialakítása, valamint a forgórész-helyzetérzékelők jelenléte szerint osztályozzák. Tehát két fő típus különbözik az ellen-EMF formájában, amelyet a tekercsek indukálnak, amikor a forgórész forog:
- BLDC - bennük egy trapéz alakú anti-EMF;
- PMSM - anti-emf szinuszos.
Ideális esetben különféle áramforrásokra (vezérlőkre) van szükségük, de a gyakorlatban cserélhetők. De ha egy téglalap alakú vagy trapéz alakú kimeneti feszültségű vezérlőt használ PMSM motorral, akkor jellegzetes hangokat hall, hasonlóan a kopogtatáshoz forgás közben.
És tervezésük szerint az ecset nélküli DC motorok:
- Belső rotorral. Ez az elektromos motor ismeretlenebb ábrázolása, amikor az állórész test és az abban elhelyezkedő tengely forog. Gyakran nevezik őket az "Inrunner" angol szónak. Ezt az opciót általában nagy sebességű villamos motorokhoz használják.
- Külső rotorral. Itt a motor külső része egy rögzített tengelygel forog, angol forrásokból ezt “outrunner” -nek hívják. Ezt az eszközáramkört akkor használják, amikor nagy pillanatra van szüksége.
A kialakítást attól függően választják meg, hogy miért van szükség egy kefe nélküli motorra egy adott alkalmazásban.
 és kitúló (jobbra)")
A modern ipar kefe nélküli motorokat gyárt rotorpozíció-érzékelőkkel és anélkül. A helyzet az, hogy a BDTT vezérlésére számos módszer létezik, mivel néhányukhoz helyzetérzékelőkre van szükség, másoknak az EMF helyzetét a tekercsekben kell meghatározniuk.a harmadik részek egyszerűen táplálják a szükséges fázisokat, és a motor egymástól függetlenül szinkronizálódik az ilyen tápegységgel, és működési üzemmódba lép.
A kefe nélküli DC motorok fő jellemzői:
- Üzemmód - hosszú vagy rövid.
- Maximális üzemi feszültség.
- Maximális üzemi áram.
- Maximális teljesítmény.
- A maximális fordulatok gyakran nem a fordulatokat jelzik, hanem a KV - r / v értéket, vagyis az alkalmazott feszültség 1 voltjára eső fordulatok számát (a tengely terhelése nélkül). A maximális sebesség eléréséhez szorozza ezt a számot a maximális feszültséggel.
- A tekercselési ellenállás (minél kisebb, annál nagyobb a hatékonyság) általában Ohm századik és ezredik ezredének felel meg.
- A fázis előrehaladási szöge (időzítése) az az idő, amely után a tekercsben lévő áram eléri a maximális értéket, ennek oka az induktivitása és a kapcsolási törvények (az induktivitásban lévő áram nem változhat azonnal.
Kapcsolási rajz
Mint fentebb említettük, a kefe nélküli motor működéséhez speciális vezérlőre van szükség. Az aliexpress mindkét készletet megtalálhatja a motorból és a vezérlőből, vagy külön. A vezérlőt ESC motornak vagy elektromos sebességszabályzónak is nevezik. Ezeket a terheléshez adott áram erőssége alapján választják meg.
Az elektromos motort a vezérlőhöz általában egyszerű csatlakoztatni, és még a próbabábu számára is érthető. A lényeg, amit tudnod kell - a forgásirány megváltoztatásához meg kell változtatnia a két fázis csatlakozását, valójában, valamint a háromfázisú aszinkron vagy szinkron motorokban.

A hálózat számos technikai megoldással és sémával rendelkezik, mind bonyolult, mind bábuk számára, amelyeket alább láthat.
Ebben a videóban a szerző elmondja, hogyan lehet barátokat szerezni a BC Arduino motorral.
És ebben a videóban megismerheti a különféle vezérlőkhöz való csatlakozás különböző módjait, valamint azt, hogy miként csinálhatja magad. A szerző ezt egy példával szemlélteti egy merevlemezről származó motorról, valamint egy pár erőteljes példányról - a behatolóról és az outrunnerről.
Mellesleg, ismétlésre alkalmazzuk a videó diagramját:

Ahol kefe nélküli motorokat használnak
Az ilyen villamos motorok terjedelme meghaladja az ütemtervet. Mindkettőt kisméretű mechanizmusok hajtására használják: CD-meghajtókban, DVD-meghajtókban, merevlemez-meghajtókban és nagy teljesítményű eszközökben: akkumulátorban és egy szerszámban (kb. 12 V tápellátással), rádióvezérelt modellekben (például quadrocopterek), CNC gépekben munkadarab vezetéséhez (általában 24 V vagy 48 V névleges feszültségű motorok).
A BDTT-ket széles körben használják elektromos járművekben, szinte az összes modern motorkerékpár az elektromos robogók, kerékpárok, motorkerékpárok és autók számára kefe nélküli motorok. Mellesleg, a szállításhoz használt villamos motorok névleges feszültsége széles tartományban rejlik, például a kerékpárkerék motorja gyakran 36 V vagy 48 V feszültséggel működik, ritka kivételekkel és így tovább, és például autókban a Toyota Prius kb. 120 V, a Nissan Leaf pedig kb. - 400-ra érkezik, miközben egy 220 V-os hálózatról tölt (ez a beépített konverter segítségével valósul meg).
Valójában a kefe nélküli villanymotorok köre nagyon széles, a kollektorcsomópont hiánya lehetővé teszi annak használatát veszélyes helyeken, valamint magas páratartalmú helyeken, anélkül, hogy félne rövidzárlattól, szikrától vagy tűztől, amely a kefeegység hibáiból fakad. Magas hatékonyságuk és jó átfogó méreteik miatt alkalmazást találtak az űriparban.
Előnyök és hátrányok
A kefe nélküli DC motorok, mint más típusú elektromos gépek, bizonyos előnyökkel és hátrányokkal is rendelkeznek.
A BDTT előnyei a következők:
- Az erős állandó mágnesek (például neodímium) gerjesztésének köszönhetően jobb a nyomaték és teljesítmény, és kisebb méretekkel rendelkeznek, mint az indukciós motorok. A legtöbb elektromos járműgyártó használja - a robogóktól az autókig.
- Nincs olyan szikrakefe-gyűjtő egység, amely rendszeres karbantartást igényel.
- Kiváló minőségű vezérlő használatakor, ugyanazon CD-től eltérően, nem zavarják az áramellátó hálózatot, ami különösen fontos a rádióvezérelt eszközöknél és a fedélzeti hálózat fejlett elektronikus berendezéseivel rendelkező járműveknél.
- A hatékonyság több mint 80, gyakrabban és 90%.
- Magas fordulatszám, egyes esetekben akár 100 000 ford / perc-ig.
De van egy jelentős mínusz: a kefe nélküli motor vezérlő nélkül csak egy darab vas, réztekercseléssel. Nem lesz képes dolgozni. A vezérlők nem olcsók, és leggyakrabban online áruházakban vagy aliexpress-en kell megrendelni. Emiatt a BC motorok használata házi készítésű modellekben és eszközökben nem mindig lehetséges.
Most már tudja, mi a kefe nélküli DC motor, hogyan működik és hol használja. Reméljük, hogy cikkünk segített rendezni az összes kérdést!
Kapcsolódó anyagok:




Végül is vannak olyan emberek, akik nemcsak megismerik az anyagot, hanem Isten tehetséges is, és képesek arra, hogy intelligensen, érthetően és nem unatkozhassák annak feltárását!
Olvastam, mint egy jó nyomozó!
Nagyon köszönöm a szerzőnek a cikket, minden sikert és minden jót az életben!
👍👍👍👍👍👍👍👍👍👍👍👍👍👍
Az egyik kivételével egyetértek. A priuson egy szokásos aszinkron 17 kW-os 380 V akkumulátorral 288 állandó. Nos, akkor egy kis elektronika, és menjünk