Làm thế nào để đảo ngược một động cơ điện trực tiếp và xoay chiều
Đảo ngược động cơ DC
Cách dễ nhất là đảo ngược động cơ DC, có stato với nam châm vĩnh cửu. Nó đủ để thay đổi cực tính của nguồn cung cấp để rôto bắt đầu quay theo hướng ngược lại.
Khó khăn hơn để đảo ngược động cơ với kích thích điện từ (nối tiếp, song song). Nếu bạn chỉ đơn giản thay đổi cực tính của điện áp cung cấp, hướng quay của rôto sẽ không thay đổi. Để thay đổi hướng quay, chỉ cần thay đổi cực tính trong cuộn dây trường hoặc chỉ trên bàn chải rôto.
Để đảo ngược các động cơ công suất cao, nên thay đổi cực tính tại mỏ neo. Một vết vỡ của trường quanh co trên một động cơ đang chạy có thể gây ra sự cố, bởi vì EMF kết quả có điện áp tăng, có thể làm hỏng cách điện của cuộn dây. Điều này sẽ dẫn đến sự thất bại của động cơ điện.
Để thực hiện hướng quay ngược của rôto, mạch cầu được sử dụng trên rơle, công tắc tơ hoặc bóng bán dẫn. Trong trường hợp sau, có thể điều chỉnh tốc độ quay.

Hình vẽ cho thấy một mạch bán dẫn. Bằng cách minh họa, các bóng bán dẫn được thay thế bằng các tiếp điểm chuyển đổi. Tương tự, các mạch cầu được thực hiện không phải trên lưỡng cực, mà trên các bóng bán dẫn hiệu ứng trường.

Hiệu suất của một mạch như vậy cao hơn nhiều so với trên các bóng bán dẫn. Việc điều khiển được thực hiện bởi một vi điều khiển hoặc các mạch logic đơn giản ngăn chặn việc cung cấp tín hiệu đồng thời.
Thay đổi hướng quay của rôto của động cơ cảm ứng
Phổ biến nhất trong công nghiệp động cơ cảm ứngđược cung cấp bởi điện áp ba pha 380 volt. Để đảo ngược, chỉ cần thay đổi bất kỳ hai giai đoạn.
Một sơ đồ nối dây được thực hiện trên hai bộ khởi động từ đã đạt được phân phối. Trên thực tế đối với động cơ DC, nó tương tự, nhưng lưỡng cực công tắc tơ hoặc bộ khởi động. Mạch này được gọi là mạch khởi động đảo ngược, hay mạch khởi động đảo ngược của động cơ điện ba pha không đồng bộ.

Khi bộ khởi động KM1 được bật bằng nút Bắt đầu 1, điện áp được đặt trực tiếp vào cuộn dây và nút Bắt đầu 2 2 bị chặn không được bật bằng cách mở các tiếp điểm thường đóng của KM-1. Động cơ quay theo một hướng.
Sau khi ngắt kết nối bộ khởi động KM1 bằng nút Dừng hoặc bằng cách loại bỏ hoàn toàn điện áp, bạn có thể bật KM2 bằng nút Bắt đầu 2. Kết quả là, thông qua các tiếp điểm, dòng L2 được cung cấp trực tiếp và L1 và L3 được hoán đổi cho nhau. Nút 1 Bắt đầu 1 bị khóa, vì các tiếp điểm thường đóng của bộ khởi động KM2 được điều khiển và mở. Động cơ bắt đầu quay theo hướng ngược lại.
Sơ đồ được sử dụng ở mọi nơi cho đến ngày nay để kết nối động cơ ba pha trong mạng ba pha. Sự đơn giản của giải pháp mạch và sự sẵn có của các thành phần là những lợi thế đáng kể của nó.
Phổ biến nhất là hệ thống điều khiển điện tử. Mạch chuyển mạch, được lắp ráp trên thyristor mà không có bộ khởi động. Mặc dù bộ khởi động có thể được cài đặt để bật hoặc tắt từ xa trong mạch này.

Chúng phức tạp hơn, nhưng cũng đáng tin cậy hơn các thiết bị trên công tắc tơ. Để điều khiển, hệ thống điều khiển pha xung (SIFU), hệ thống điều khiển tần số được sử dụng. Đây là những thiết bị đa chức năng, với sự giúp đỡ của chúng, không chỉ có thể đảo ngược động cơ điện không đồng bộ mà còn điều chỉnh tần số quay.
Ở nhà, cần phải kết nối động cơ 380V đến 220 với đảo ngược. Để làm điều này, bạn cần chuyển đổi cuộn dây hình tam giác sao. Chi tiết hơn, chúng tôi đã kiểm tra sự khác biệt giữa các chương trình này trong một bài viết được đăng trên trang web trước đó: https://electroEx.com/chto-takoe-zvezda-i-treugolnik-v-elektrodvigatele.html.
Tuy nhiên, nếu có ý định kết nối động cơ điện ba pha với mạng một pha, sau đó một tụ điện được sử dụng cho việc này, được kết nối theo sơ đồ dưới đây.
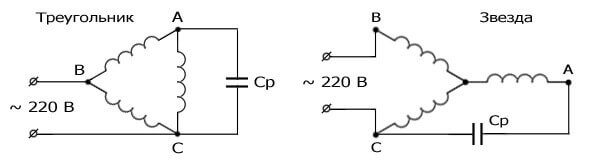
Trong trường hợp này, để đảo ngược, việc chuyển dây mạng từ B sang đầu A là đủ, và ngắt kết nối tụ điện khỏi A và kết nối với đầu cuối B. Thật thuận tiện khi thực hiện việc này bằng cách sử dụng công tắc bật tắt 6 chân. Đây là sự bao gồm điển hình của động cơ cảm ứng vào mạng 220 V có tụ điện.
Sơ đồ nối dây cho động cơ cổ góp đảo ngược
Để đảo ngược động cơ collector, bạn cần biết:
- Không phải tất cả mọi người động cơ thu có thể đảo ngược. Nếu mũi tên xoay được chỉ định trong trường hợp, thì nó không thể được sử dụng trong các thiết bị đảo ngược.
- Tất cả các động cơ có vòng quay cao được thiết kế để xoay theo một hướng. Ví dụ, một động cơ điện được cài đặt trong máy nghiền.
- Trong một động cơ có vòng quay thấp, việc quay có thể được thực hiện theo các hướng khác nhau. Động cơ như vậy được gắn trong các công cụ điện, ví dụ, máy khoan điện, tua vít, máy giặt, vv
Hình vẽ cho thấy một sơ đồ của một động cơ cổ góp phổ quát, có thể hoạt động cả từ dòng điện một chiều và xoay chiều.

Để thay đổi vòng quay của rôto, đủ để thay đổi cực tính của điện áp trên cuộn dây rôto hoặc stato, như trong động cơ DC, từ đó các máy vạn năng thực tế không khác nhau.
Nếu bạn chỉ đơn giản thay đổi cực tính của điện áp cung cấp cho động cơ collector, hướng quay của rôto sẽ không thay đổi. Điều này phải được tính đến khi kết nối động cơ điện với mạng.
Bạn cũng nên biết rằng trong các động cơ công suất cao, cuộn dây phần ứng đi lại. Khi chuyển đổi cuộn dây stato, điện áp xuất hiện tự cảm ứng, đạt đến các giá trị có thể vô hiệu hóa động cơ.
Các nhà thiết kế nghiệp dư trong hàng thủ công của họ sử dụng nhiều loại động cơ. Thường thì họ sử dụng động cơ bàn chải từ máy giặt.Đây là những động cơ tiện lợi có thể được kết nối trực tiếp với mạng 220 volt. Chúng không yêu cầu các tụ điện bổ sung, và điều khiển tốc độ có thể được thực hiện dễ dàng bằng cách sử dụng bộ điều chỉnh độ sáng tiêu chuẩn. Sáu hoặc bảy chân được xuất ra khối đầu cuối.
Phụ thuộc vào loại động cơ:
- Hai đi đến bàn chải sưu tập.
- Một cặp dây đến từ máy đo tốc độ đến khối.
- Cuộn dây trường có thể có hai hoặc ba dây. Thứ ba phục vụ để thay đổi tốc độ quay.

Để đảo ngược động cơ từ máy giặt, cần phải trao đổi các đầu ra của cuộn dây trường. Nếu có kết luận thứ ba, thì nó không được sử dụng.
Arduino động cơ điện đảo ngược
Trong thiết kế mô hình hoặc robot, động cơ chổi than DC nhỏ thường được sử dụng, được điều khiển bởi một vi điều khiển arduino lập trình.
Nếu vòng quay của động cơ chỉ được coi là một chiều và công suất động cơ điện nhỏ và điện áp cung cấp từ 3,3 đến 5 volt, thì mạch có thể được đơn giản hóa và cấp nguồn trực tiếp từ arduino, nhưng điều này hiếm khi được thực hiện.
Trong các mô hình có điều khiển từ xa, trong đó cần phải sử dụng động cơ đảo ngược có điện áp lớn hơn 5V, áp dụng các phím được lắp ráp theo mạch cầu. Trong trường hợp này, sơ đồ kết nối của động cơ ngược với arduino sẽ trông tương tự như hiển thị bên dưới. Sự bao gồm này thường được sử dụng nhất.

Trong mạch cầu, có thể sử dụng các bóng bán dẫn hiệu ứng trường hoặc một thiết bị phù hợp đặc biệt - một trình điều khiển có động cơ mạnh được kết nối.
Để kết luận, chúng tôi lưu ý rằng một chuyên gia được đào tạo phải lắp ráp mạch đảo ngược của động cơ điện. Tuy nhiên, khi tự kết nối, cần tuân thủ các điều kiện an toàn, chọn sơ đồ kết nối phù hợp và chọn các phụ kiện cần thiết, tuân thủ nghiêm ngặt các hướng dẫn cài đặt. Trong trường hợp này, nhà thiết kế sẽ không gặp khó khăn trong việc kết nối và vận hành động cơ điện.
Bây giờ bạn đã biết sự đảo ngược của động cơ điện là gì và sơ đồ kết nối nào được sử dụng cho việc này. Chúng tôi hy vọng thông tin được cung cấp là hữu ích và thú vị cho bạn!
Tài liệu liên quan: