Động cơ cảm ứng là gì và nó hoạt động như thế nào
Động cơ cảm ứng rất đơn giản và đáng tin cậy và đây là lý do tại sao nó rất thường được sử dụng trong sản xuất và trong các thiết bị gia dụng, từ ổ đĩa van đến vòng quay của trống trong máy giặt. Trong bài viết này, nói một cách đơn giản, chúng ta sẽ nói về động cơ điện không đồng bộ là gì, nó là gì và loại máy điện này hoạt động như thế nào.
Loài
Động cơ cảm ứng (AM) được chia thành hai nhóm chính:
- cánh quạt lồng sóc
- với một rôto pha.
Nếu chúng ta bỏ qua các sắc thái, sự khác biệt là động cơ cánh quạt lồng sóc không có chổi than và cuộn dây rõ rệt, nó ít đòi hỏi phải bảo trì. Trong khi đó trong các động cơ không đồng bộ với một rôto pha có ba cuộn dây được nối với các vòng trượt, dòng điện từ đó được loại bỏ bằng bàn chải. Không giống như trước đây, tốt hơn là kiểm soát mô-men xoắn trên trục và dễ dàng hơn để nhận ra một khởi đầu trơn tru để giảm dòng vào.
Phần còn lại của động cơ phân loại:
- theo số lượng pha cung cấp - một pha và hai pha (được sử dụng trong cuộc sống hàng ngày khi được cung cấp bởi mạng 220 V) và ba pha (được sử dụng rộng rãi nhất trong sản xuất và trong các xưởng).
- bằng cách buộc chặt - mặt bích hoặc trên bàn chân.
- theo chế độ hoạt động - cho chế độ dài hạn, ngắn hạn hoặc lặp lại ngắn hạn.
Và một số yếu tố khác ảnh hưởng đến việc lựa chọn một sản phẩm cụ thể để sử dụng trong các điều kiện cụ thể.
Rất nhiều điều có thể nói về động cơ điện một pha: một số trong số chúng được phóng qua tụ điện, và một số yêu cầu công suất khởi động và làm việc. Ngoài ra còn có các tùy chọn với một vòng quay ngắn, hoạt động mà không cần tụ điện và được sử dụng, ví dụ, trong mũ trùm. Nếu bạn quan tâm, viết trong các ý kiến và chúng tôi sẽ viết một bài viết về nó.
Thiết bị
Theo định nghĩa, từ không đồng bộ, đề cập đến một động cơ xoay chiều trong đó rôto quay chậm hơn từ trường của stato, nghĩa là không đồng bộ. Nhưng định nghĩa này không quá nhiều thông tin. Để hiểu nó, bạn cần tìm hiểu làm thế nào động cơ này được thiết kế.
Một động cơ cảm ứng, giống như bất kỳ động cơ nào khác, bao gồm hai phần chính - rôto và stato. Chúng tôi giải mã:
- Stator được gọi là phần cố định của bất kỳ máy phát điện hoặc động cơ điện.
- Rôto được gọi là bộ phận quay của động cơ, điều khiển các cơ cấu.

Stator bao gồm một vỏ, các đầu của chúng được đóng lại bằng các tấm chắn vòng bi trong đó các vòng bi được lắp đặt. Tùy thuộc vào mục đích và sức mạnh của động cơ, vòng bi trượt hoặc lăn được sử dụng. Lõi được đặt trong trường hợp, một cuộn dây được cài đặt trên nó. Nó được gọi là cuộn dây stato.

Vì dòng điện xoay chiều để giảm tổn thất do dòng điện đi lạc (Dòng chảy Foucault) lõi stator được rút ra từ các tấm thép mỏng được phân lập với nhau theo tỷ lệ và liên kết với vecni.Một điện áp cung cấp được cung cấp cho cuộn dây stato, dòng điện chạy trong chúng được gọi là dòng điện stato.
Số lượng cuộn dây phụ thuộc vào số lượng giai đoạn cung cấp và thiết kế của động cơ. Vì vậy, một động cơ ba pha có ít nhất ba cuộn dây được nối với nhau bằng một mạch sao hoặc tam giác. Số lượng của chúng có thể lớn hơn và nó ảnh hưởng đến tốc độ quay của trục, nhưng chúng ta sẽ nói về điều này sau.
Nhưng với rôto, mọi thứ thú vị hơn, như đã đề cập, nó có thể là ngắn mạch hoặc pha.

Rôto lồng sóc là một bộ thanh kim loại (thường là nhôm hoặc đồng), trong hình trên, chúng được biểu thị bằng số 2, hàn hoặc điền vào lõi (1), được đóng bởi các vòng (3). Thiết kế này giống như một bánh xe trong đó các loài gặm nhấm thuần hóa chạy, đó là lý do tại sao nó thường được gọi là chuồng sóc sóc hay lồng sóc sóc và tên này không phải là tiếng lóng, mà là văn học. Để giảm sóng hài cao hơn của EMF và xung của từ trường, các thanh được đặt không dọc theo trục, nhưng ở một góc nhất định so với trục quay.
Rôto pha khác với rôto trước ở chỗ nó đã có ba cuộn dây, như trên một stato. Đầu của các cuộn dây được nối với các vòng, thường là đồng, chúng được ép vào trục động cơ. Sau đó chúng tôi sẽ giải thích ngắn gọn tại sao chúng cần thiết.

Trong cả hai trường hợp, một trong hai đầu của trục được kết nối với một cơ cấu điều khiển bởi chuyển động, nó có dạng hình nón hoặc hình trụ có hoặc không có rãnh để lắp đặt mặt bích, ròng rọc và các bộ phận truyền động cơ học khác.
Một bánh công tác, cần thiết để thổi và làm mát, được cố định trên phần trục phía sau của trục, một vỏ được đặt trên vỏ trên bánh công tác. Do đó, không khí lạnh được dẫn dọc theo các cạnh của động cơ cảm ứng, nếu vì lý do nào đó, bánh công tác này không quay, nó sẽ quá nóng.

Thiết kế của động cơ cảm ứng đầu tiên được phát triển bởi M.O. Dolivo-Dobrovolsky và ông đã cấp bằng sáng chế vào năm 1889. Không có bất kỳ thay đổi nào, nó vẫn tồn tại cho đến hiện tại.
Nguyên tắc làm việc
Máy điện không đồng bộ thường được gọi là cảm ứng, điều này là do nguyên tắc hoạt động của chúng. Bất kỳ động cơ điện nào được điều khiển quay vòng là kết quả của sự tương tác của từ trường của rôto và stato, cũng như do lực Ampere. Ngược lại, một từ trường có thể tồn tại xung quanh một nam châm vĩnh cửu hoặc xung quanh một dây dẫn mà dòng điện chạy qua. Nhưng chính xác thì một máy không đồng bộ hoạt động như thế nào?
Trong một động cơ cảm ứng, không giống như những người khác, không có cuộn dây trường, trong khi nó có từ trường? Câu trả lời rất đơn giản: một động cơ cảm ứng là một máy biến áp.
Hãy xem xét nguyên tắc hoạt động của nó trên ví dụ về máy ba pha, vì chính chúng được tìm thấy thường xuyên hơn các máy khác.
Trong hình bên dưới, bạn thấy vị trí của các cuộn dây trên lõi stato của động cơ không đồng bộ ba pha.

Kết quả của dòng điện ba pha, từ trường quay xuất hiện trong cuộn dây stato. Do sự dịch pha, dòng điện chạy một hoặc một cuộn dây khác, theo đó có một từ trường, các cực của chúng được định hướng theo quy tắc của bàn tay phải. Và theo sự thay đổi của dòng điện trong một hoặc một cuộn dây khác, các cực được gửi theo hướng tương ứng. Như hình ảnh động sau đây minh họa:

Trong trường hợp đơn giản nhất (hai cực), các cuộn dây được xếp chồng lên nhau sao cho mỗi trong số chúng được bù 120 độ so với trước đó, cũng như góc pha của điện áp trong mạng AC.
Tốc độ quay của từ trường stato được gọi là đồng bộ. Tìm hiểu thêm về cách nó xoay và lý do bạn sẽ học từ video tiếp theo. Lưu ý rằng trong động cơ hai pha (tụ điện) và một pha - nó không quay, mà là hình elip hoặc dao động, và cuộn dây không phải là 3, mà là 2.
Nếu chúng ta xem xét một động cơ không đồng bộ với rôto lồng sóc, từ trường của stato sẽ tạo ra EMF trong các thanh của nó, vì chúng được đóng lại, sau đó là dòng điện.Bởi vì điều này, một từ trường cũng xảy ra.
Là kết quả của sự tương tác của hai lĩnh vực và Lực lượng ampetác động lên rôto, nó bắt đầu quay sau từ trường quay của stato, nhưng nó luôn chậm hơn một chút so với tốc độ quay của MP stato, độ trễ này được gọi là trượt.
Nếu tốc độ quay của từ trường được gọi là đồng bộ, thì tốc độ quay của rôto đã không đồng bộ, từ đó anh ta nhận được tên này.
Trong AD với một rôto pha, mọi thứ đều tương tự nhau, ngoại trừ một bộ biến trở được kết nối với các vòng của nó, sau khi động cơ chuyển sang chế độ vận hành, được tháo ra khỏi mạch và các cuộn dây bị ngắn mạch. Điều này được thể hiện trong sơ đồ bên dưới, nhưng thay vì bộ biến trở, các điện trở không đổi được sử dụng, kết nối hoặc tắt bởi các công tắc tơ KM3, KM2, KM1.
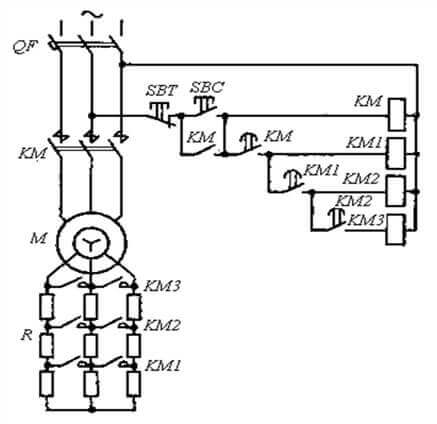
Cách tiếp cận này cho phép khởi động trơn tru và giảm dòng điện xâm nhập, bằng cách tăng điện trở hoạt động của rôto.
 Để tóm tắt:
Để tóm tắt:
- Dòng điện trong cuộn dây stato tạo ra từ trường.
- Từ trường dẫn đến dòng điện trong rôto.
- Dòng điện trong rôto làm cho một trường xuất hiện xung quanh nó.
- Vì trường stato quay, vì trường của nó, rôto bắt đầu quay phía sau nó.
Tốc độ trượt và xoay
Tần số quay của từ trường stato (n1) lớn hơn tần số quay của rôto (n2). Sự khác biệt giữa chúng được gọi là phiếu và được ký hiệu bằng chữ Latinh S và được tính theo công thức:
S = (n1-n2) * 100% / n1
Trượt không phải là một nhược điểm của động cơ điện này, bởi vì nếu trục của nó quay cùng tần số với từ trường của stato (thì đồng bộ), thì sẽ không có dòng điện nào được tạo ra trong các thanh của nó, và đơn giản là nó sẽ không quay.
Bây giờ về một khái niệm quan trọng hơn - tốc độ quay của rôto của động cơ cảm ứng. Nó phụ thuộc vào 3 giá trị:
- tần số điện áp cung cấp (f);
- số lượng cặp cực từ (p);
- trượt (S).
Số lượng các cặp cực từ xác định tốc độ quay đồng bộ của trường và phụ thuộc vào số lượng cuộn dây stato. Độ trượt phụ thuộc vào tải và thiết kế của một động cơ điện cụ thể và nằm trong phạm vi 3-10%, nghĩa là tốc độ không đồng bộ thấp hơn một chút so với đồng bộ. Chà, tần số của dòng điện xoay chiều được cố định ở mức 50 Hz.
Do đó, tốc độ quay của trục của động cơ cảm ứng rất khó điều chỉnh, bạn chỉ có thể ảnh hưởng đến tần số của nguồn điện, nghĩa là bằng cách cài đặt bộ biến tần. Tuy nhiên, có thể hạ thấp điện áp của stato, nhưng sau đó công suất trên trục giảm, tuy nhiên, kỹ thuật này được sử dụng khi bắt đầu AM với việc chuyển các cuộn dây từ sao sang delta để giảm dòng khởi động.
Tần số quay của trường stato (tốc độ đồng bộ) được xác định theo công thức:
n = 60 * f / p
Vì vậy, trong một động cơ có một cặp cực từ (hai cực), tốc độ đồng bộ là:
60 * 50/1 = 3000 vòng / phút
Các tùy chọn phổ biến nhất cho động cơ điện với:
- một cặp cực (3000 vòng / phút);
- hai (1500 vòng / phút);
- ba (1000 vòng / phút);
- bốn (750 vòng / phút).
Tốc độ cánh quạt thực tế sẽ thấp hơn một chút, trên một động cơ cảm ứng thực, nó được chỉ định trên bảng tên, ví dụ, ở đây - 2730 vòng / phút. Mặc dù vậy, mọi người sẽ gọi một động cơ không đồng bộ như vậy theo tốc độ đồng bộ hoặc chỉ đơn giản là ba nghìn mét.

Sau đó, độ trượt của nó bằng:
3000-2730*100%/3000=9%
Phạm vi áp dụng
Động cơ điện không đồng bộ đã tìm thấy ứng dụng trong tất cả các lĩnh vực hoạt động của con người. Những thiết bị được cấp nguồn từ một pha (từ 220 V) có thể được tìm thấy trong các bộ truyền động có công suất thấp hoặc trong các thiết bị và dụng cụ gia đình, ví dụ:
- trong một máy giặt loại "em bé" và các kiểu máy cũ khác của Liên Xô;
- trong một máy trộn bê tông;
- trong quạt;
- trong mui xe;
- và thậm chí trong máy cắt cỏ của phân khúc giá cao.



Trong sản xuất trong mạng ba pha:
- van cổng tự động;
- cơ cấu nâng (cần cẩu và tời);
- thông gió
- máy nén khí;
- Bơm
- máy gỗ và kim loại và nhiều hơn nữa.




AD cũng được sử dụng trong xe điện, và gần đây, động cơ không đồng bộ với cuộn dây kiểu Sl lượn sóng và cái gọi là bánh xe máy Duyunov được quảng cáo tích cực trên Internet, bạn có thể tìm hiểu từ video của nhà phát triển.
Phạm vi của động cơ không đồng bộ rất lớn đến nỗi chỉ riêng danh sách sẽ dài hơn bài viết này, vì vậy mỗi thợ điện nên biết nó hoạt động như thế nào, nó dùng để làm gì và sử dụng ở đâu. Để tóm tắt và liệt kê những ưu và nhược điểm của các thiết bị này.
Ưu điểm:
- Thi công đơn giản.
- Chi phí thấp
- Hầu như không cần bảo trì.
Nhược điểm chính là khó điều chỉnh tốc độ so với các động cơ DC hoặc máy thu gom phổ thông. Theo đó, rất khó để tổ chức khởi động trơn tru các máy lớn và thường thì việc này được thực hiện bằng cách sử dụng bộ chuyển đổi tần số đắt tiền.
Đây là nơi chúng tôi kết thúc với việc xem xét các động cơ cảm ứng và phạm vi của chúng. Chúng tôi hy vọng rằng sau khi đọc bài viết, bạn sẽ hiểu nó là gì và máy điện này hoạt động như thế nào!
Tài liệu liên quan:




