มอเตอร์เหนี่ยวนำคืออะไรและทำงานอย่างไร
มอเตอร์เหนี่ยวนำนั้นเรียบง่ายและเชื่อถือได้และนี่คือเหตุผลว่าทำไมมันจึงถูกนำมาใช้อย่างมากในการผลิตและในเครื่องใช้ในครัวเรือนตั้งแต่การขับเคลื่อนวาล์วไปจนถึงการหมุนของถังซักในเครื่อง ในบทความนี้เราจะบอกคุณด้วยคำง่าย ๆ เกี่ยวกับมอเตอร์ไฟฟ้าแบบอะซิงโครนัสอะไรคืออะไรและเครื่องใช้ไฟฟ้าประเภทนี้ทำงานอย่างไร
เข้าชม
มอเตอร์เหนี่ยวนำ (AM) แบ่งออกเป็นสองกลุ่มหลัก:
- กรงกระรอกโรเตอร์
- ด้วยโรเตอร์เฟส
หากเราละเว้นความแตกต่างความแตกต่างก็คือมอเตอร์ใบพัดกรงกระรอกไม่มีแปรงและขดลวดที่เด่นชัดมันมีความต้องการในการบำรุงรักษาน้อยกว่า ในขณะที่มอเตอร์แบบอะซิงโครนัสที่มีเฟสโรเตอร์มีขดลวดสามเส้นเชื่อมต่อกับสลิปแหวนกระแสไฟฟ้าที่ถูกลบออกด้วยแปรง ซึ่งแตกต่างจากก่อนหน้านี้จะดีกว่าในการควบคุมแรงบิดบนเพลาและมันเป็นเรื่องง่ายที่จะตระหนักถึงการเริ่มต้นที่ราบรื่นเพื่อลดกระแสการไหลเข้า
ส่วนที่เหลือของเครื่องยนต์จัดประเภท:
- ตามจำนวนขั้นตอนการจัดหา - เฟสเดียวและสองเฟส (ใช้ในชีวิตประจำวันเมื่อขับเคลื่อนโดยเครือข่าย 220V) และสามเฟส (ใช้กันอย่างแพร่หลายในการผลิตและในการประชุมเชิงปฏิบัติการ)
- โดยวิธีการยึด - หน้าแปลนหรือบนอุ้งเท้า
- โดยโหมดการทำงาน - สำหรับโหมดระยะยาวระยะสั้นหรือระยะสั้นซ้ำ ๆ
และปัจจัยอื่น ๆ อีกจำนวนหนึ่งที่มีผลต่อการเลือกใช้ผลิตภัณฑ์เฉพาะเพื่อใช้ในเงื่อนไขเฉพาะ
สามารถพูดได้หลายอย่างเกี่ยวกับมอเตอร์ไฟฟ้าแบบเฟสเดียว: บางตัวมีการเปิดตัวผ่านตัวเก็บประจุและบางตัวต้องการความสามารถในการเริ่มต้นและการทำงาน นอกจากนี้ยังมีตัวเลือกด้วยการเลี้ยวลัดวงจรซึ่งทำงานโดยไม่มีตัวเก็บประจุและใช้ตัวอย่างเช่นในฮูด หากคุณสนใจเขียนความคิดเห็นและเราจะเขียนบทความเกี่ยวกับมัน
เครื่อง
ตามคำจำกัดความ“ asynchronous” หมายถึงมอเตอร์ AC ที่โรเตอร์หมุนช้ากว่าสนามแม่เหล็กของสเตเตอร์นั่นคืออะซิงโครนัส แต่คำจำกัดความนี้ไม่ให้ข้อมูลมากเกินไป เพื่อให้เข้าใจได้คุณต้องเข้าใจว่าเครื่องมือนี้ได้รับการออกแบบอย่างไร
มอเตอร์เหนี่ยวนำเหมือนกันประกอบด้วยสองส่วนหลัก - โรเตอร์และสเตเตอร์. “ สำหรับหุ่น” ในการถอดรหัสเราถอดรหัส:
- สเตเตอร์เรียกว่าส่วนคงที่ของเครื่องกำเนิดไฟฟ้าหรือมอเตอร์ไฟฟ้า
- โรเตอร์เรียกว่าส่วนที่หมุนของเครื่องยนต์ซึ่งขับเคลื่อนกลไก

สเตเตอร์ประกอบด้วยที่อยู่อาศัยปลายซึ่งถูกปิดโดยโล่แบริ่งที่ติดตั้งแบริ่ง ขึ้นอยู่กับวัตถุประสงค์และพลังของเครื่องยนต์ใช้ตลับลูกปืนแบบเลื่อนหรือแบบหมุน แกนตั้งอยู่ในกรณีที่มีการติดตั้งที่คดเคี้ยว มันเรียกว่าขดลวดสเตเตอร์

เนื่องจากกระแสไฟฟ้าสลับเพื่อลดความสูญเสียอันเนื่องมาจากกระแสเร่ร่อน (กระแส Foucault) แกนสเตเตอร์ถูกดึงมาจากแผ่นเหล็กบาง ๆ ที่แยกได้จากกันโดยสเกลและยึดด้วยวานิชแรงดันของแหล่งจ่ายถูกจ่ายให้กับขดลวดสเตเตอร์กระแสที่ไหลในนั้นเรียกว่ากระแสสเตเตอร์
จำนวนขดลวดขึ้นอยู่กับจำนวนเฟสของอุปทานและการออกแบบมอเตอร์ ดังนั้นมอเตอร์สามเฟสจึงมีอย่างน้อยสามขดลวดที่เชื่อมต่อกันด้วยวงจรดาวหรือสามเหลี่ยม จำนวนของพวกเขาอาจมากกว่าและมีผลต่อความเร็วในการหมุนของเพลา แต่เราจะพูดถึงเรื่องนี้ในภายหลัง
แต่ด้วยโรเตอร์สิ่งต่าง ๆ น่าสนใจมากขึ้นดังที่ได้กล่าวไปแล้วมันอาจเป็นแบบลัดวงจรหรือเฟส

โรเตอร์กรงกระรอกเป็นชุดของแท่งโลหะ (โดยทั่วไปคืออลูมิเนียมหรือทองแดง) ในรูปด้านบนพวกเขาจะถูกระบุด้วยหมายเลข 2, บัดกรีหรือเติมเข้าไปในแกน (1) ปิดด้วยแหวน (3) การออกแบบนี้มีลักษณะคล้ายกับล้อที่หนูใช้งานบ้านซึ่งเป็นสาเหตุที่มักจะเรียกว่า "กรงกระรอก" หรือ "ล้อกระรอก" และชื่อนี้ไม่สแลง แต่ค่อนข้างวรรณกรรม เพื่อลดฮาร์มอนิกส์ที่สูงขึ้นของ EMF และการเต้นของสนามแม่เหล็กแท่งจะไม่ถูกวางตามแนวเพลา แต่ในมุมที่สัมพันธ์กับแกนการหมุน
โรเตอร์เฟสแตกต่างจากอันก่อนหน้าซึ่งมีขดลวดสามเส้นอยู่ในสเตเตอร์ จุดเริ่มต้นของขดลวดจะเชื่อมต่อกับวงแหวนโดยทั่วไปจะเป็นทองแดงพวกเขาจะถูกกดลงบนเพลามอเตอร์ หลังจากนั้นเราจะอธิบายสั้น ๆ ว่าทำไมจึงมีความจำเป็น

ในทั้งสองกรณีปลายด้านหนึ่งของเพลาถูกเชื่อมต่อกับกลไกที่ขับเคลื่อนโดยการเคลื่อนที่มันเป็นรูปทรงกรวยหรือรูปทรงกระบอกที่มีหรือไม่มีร่องเพื่อติดตั้งหน้าแปลน, รอกและชิ้นส่วนเครื่องจักรกลอื่น ๆ
ใบพัดซึ่งจำเป็นสำหรับการเป่าลมและการระบายความร้อนจะถูกติดตั้งไว้ที่ส่วน "ด้านหลัง" ของเพลาและมีการใส่ปลอกไว้บนตัวเรือนเหนือใบพัด ดังนั้นอากาศเย็นจะถูกนำไปตามซี่โครงของมอเตอร์เหนี่ยวนำหากมีเหตุผลบางอย่างที่ใบพัดนี้ไม่หมุนมันจะร้อนเกินไป

การออกแบบมอเตอร์เหนี่ยวนำครั้งแรกได้รับการพัฒนาโดย M.O. Dolivo-Dobrovolsky และเขาจดสิทธิบัตรในปี 1889 โดยไม่มีการเปลี่ยนแปลงใด ๆ มันรอดชีวิตมาได้จนถึงปัจจุบัน
หลักการทำงาน
เครื่องจักรไฟฟ้าแบบอะซิงโครนัสมักถูกเรียกว่าการเหนี่ยวนำนี่เป็นเพราะหลักการของการทำงาน มอเตอร์ไฟฟ้าใด ๆ ถูกขับเคลื่อนให้หมุนเนื่องจากการปฏิสัมพันธ์ของสนามแม่เหล็กของโรเตอร์และสเตเตอร์รวมถึงแรงแอมป์ ในทางกลับกันสนามแม่เหล็กอาจมีอยู่รอบ ๆ แม่เหล็กถาวรหรือรอบ ๆ ตัวนำที่กระแสไหลผ่าน แต่เครื่องอะซิงโครนัสทำงานอย่างไร?
ในมอเตอร์เหนี่ยวนำซึ่งแตกต่างจากคนอื่น ๆ ไม่มีสนามที่คดเคี้ยวต่อ se ในขณะที่มันมีสนามแม่เหล็ก? คำตอบนั้นง่าย: มอเตอร์เหนี่ยวนำเป็นหม้อแปลง
พิจารณาหลักการของการดำเนินการกับตัวอย่างของเครื่องสามเฟสเนื่องจากเป็นสิ่งที่พบได้บ่อยกว่าเครื่องอื่น
ในภาพด้านล่างคุณจะเห็นตำแหน่งของขดลวดบนแกนสเตเตอร์ของมอเตอร์แบบอะซิงโครนัสสามเฟส

จากการไหลของกระแสสามเฟสสนามแม่เหล็กหมุนจะปรากฏในขดลวดสเตเตอร์ เนื่องจากการเลื่อนเฟสกระแสไฟฟ้าไหลหนึ่งหรือขดลวดอื่น ๆ ตามนี้มีสนามแม่เหล็ก, เสาที่ถูกกำกับตามกฎของมือขวา และสอดคล้องกับการเปลี่ยนแปลงของกระแสในขดลวดหนึ่งหรืออีกขั้วหนึ่งเสาจะถูกส่งไปในทิศทางที่สอดคล้องกัน เป็นภาพเคลื่อนไหวต่อไปนี้แสดงให้เห็นถึง:

ในกรณีที่ง่ายที่สุด (สองขั้ว) ขดลวดจะถูกจัดเรียงในลักษณะที่แต่ละอันจะถูกชดเชยด้วย 120 องศาเทียบกับก่อนหน้านี้เช่นเดียวกับมุมเฟสของแรงดันไฟฟ้าในเครือข่าย AC
ความเร็วการหมุนของสนามแม่เหล็กสเตเตอร์เรียกว่าซิงโครนัส เรียนรู้เพิ่มเติมเกี่ยวกับการหมุนและทำไมคุณจะเรียนรู้จากวิดีโอถัดไป โปรดทราบว่าในสองเฟส (ตัวเก็บประจุ) และมอเตอร์เฟสเดียว - มันไม่หมุน แต่เป็นรูปไข่หรือเร้าใจและขดลวดไม่ได้เป็น 3 แต่ 2
ถ้าเราพิจารณาว่ามอเตอร์แบบอะซิงโครนัสกับโรเตอร์กรงกระรอกสนามแม่เหล็กของสเตเตอร์จะเหนี่ยวนำให้เกิด EMF ในแท่งเนื่องจากมันปิดแล้วกระแสจะไหลด้วยเหตุนี้สนามแม่เหล็กจึงเกิดขึ้น
เป็นผลมาจากการทำงานร่วมกันของสองฟิลด์และ กำลังแรงเมื่อหมุนไปตามใบพัดมันเริ่มหมุนหลังจากสนามแม่เหล็กหมุนของสเตเตอร์ แต่มันก็ช้ากว่าความเร็วการหมุนของสเตเตอร์ MP เล็กน้อยความล่าช้านี้เรียกว่าสลิป
หากความเร็วในการหมุนของสนามแม่เหล็กเรียกว่าซิงโครนัสความเร็วในการหมุนของโรเตอร์จะไม่ตรงกันซึ่งเขาได้รับชื่อนี้แล้ว
ในโฆษณาที่มีโรเตอร์แบบเฟสสิ่งต่าง ๆ คล้ายกันยกเว้นว่ามีการเชื่อมต่อรีโนมิเตอร์กับวงแหวนซึ่งหลังจากที่เครื่องยนต์เข้าสู่โหมดการทำงานจะถูกลบออกจากวงจรและขดลวดจะลัดวงจร สิ่งนี้แสดงไว้ในแผนภาพด้านล่าง แต่แทนที่จะใช้ rheostat ตัวต้านทานคงที่จะใช้เชื่อมต่อหรือแบ่งตามคอนแทคเลนส์ KM3, KM2, KM1
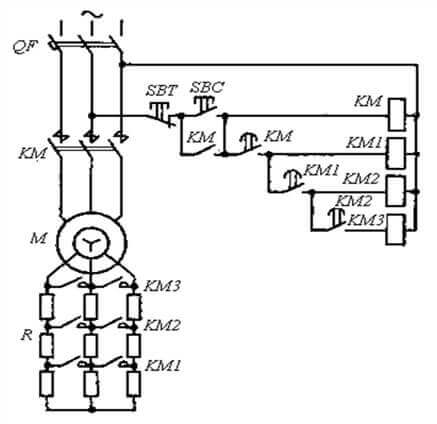
วิธีนี้ช่วยให้การเริ่มต้นราบรื่นและลดกระแสการไหลเข้าโดยเพิ่มความต้านทานไฟฟ้าที่ใช้งานของโรเตอร์
 เพื่อสรุป:
เพื่อสรุป:
- กระแสในขดลวดสเตเตอร์สร้างสนามแม่เหล็ก
- สนามแม่เหล็กนำไปสู่กระแสในโรเตอร์
- กระแสในใบพัดนำไปสู่การปรากฏตัวของสนามรอบ ๆ มัน
- เนื่องจากสนามสเตเตอร์หมุนเนื่องจากสนามหมุนใบพัดจึงเริ่มหมุนตามหลัง
ใบและความเร็วในการหมุน
ความถี่การหมุนของสนามแม่เหล็กสเตเตอร์ (n1) มากกว่าความถี่การหมุนของโรเตอร์ (n2) ความแตกต่างระหว่างพวกเขาเรียกว่าสลิปและแสดงโดยตัวอักษรละติน S และคำนวณโดยสูตร:
S = (n1-n2) * 100% / n1
การเลื่อนไม่ได้เป็นข้อเสียเปรียบของมอเตอร์ไฟฟ้านี้เพราะถ้าเพลาของมันหมุนด้วยความถี่เดียวกับสนามแม่เหล็กสเตเตอร์ (ซิงโครนัส) จากนั้นก็จะไม่มีกระแสไฟฟ้าเหนี่ยวนำในแท่งของมันและมันจะไม่หมุน
ตอนนี้เกี่ยวกับแนวคิดที่สำคัญกว่า - ความเร็วในการหมุนของโรเตอร์ของมอเตอร์เหนี่ยวนำ มันขึ้นอยู่กับ 3 ค่า:
- ความถี่แรงดันไฟฟ้า (f);
- จำนวนคู่ของเสาแม่เหล็ก (p);
- สลิป (S)
จำนวนคู่ของขั้วแม่เหล็กกำหนดความเร็วซิงโครนัสของการหมุนของสนามและขึ้นอยู่กับจำนวนของขดลวดสเตเตอร์ การเลื่อนขึ้นอยู่กับโหลดและการออกแบบของมอเตอร์ไฟฟ้าโดยเฉพาะและอยู่ในช่วง 3-10% นั่นคือความเร็วอะซิงโครนัสนั้นน้อยกว่าแบบซิงโครนัสเล็กน้อย ความถี่ของกระแสสลับคงที่ที่ 50 Hz
ดังนั้นความเร็วในการหมุนของเพลาของมอเตอร์เหนี่ยวนำเป็นเรื่องยากที่จะควบคุมคุณสามารถส่งผลกระทบต่อความถี่ของไฟเท่านั้นนั่นคือโดยการตั้งค่า ตัวแปลงความถี่. มีความเป็นไปได้ที่จะลดแรงดันสเตเตอร์ลง แต่จากนั้นพลังงานบนเพลาจะลดลงอย่างไรก็ตามเทคนิคดังกล่าวจะถูกใช้เมื่อเริ่มต้น AM ด้วยการสลับขดลวดจากดาวเป็นเดลต้าเพื่อลดกระแสเริ่มต้น
ความถี่ของการหมุนของสนามสเตเตอร์ (ความเร็วแบบซิงโครนัส) ถูกกำหนดโดยสูตร:
n = 60 * f / p
ดังนั้นในเครื่องยนต์ที่มีเสาแม่เหล็กหนึ่งคู่ (สองขั้ว) ความเร็วซิงโครนัสคือ:
60 * 50/1 = 3000 รอบต่อนาที
ตัวเลือกทั่วไปสำหรับมอเตอร์ไฟฟ้าที่มี:
- หนึ่งคู่ของเสา (3000 รอบต่อนาที);
- สอง (1500 รอบต่อนาที);
- สาม (1,000 รอบต่อนาที);
- สี่ (750 รอบต่อนาที)
ความเร็วของโรเตอร์ที่แท้จริงจะลดลงเล็กน้อยสำหรับมอเตอร์เหนี่ยวนำจริงที่ระบุไว้บนแผ่นป้ายตัวอย่างเช่นที่นี่ - 2730 รอบต่อนาที อย่างไรก็ตามเรื่องนี้ผู้คนจะเรียกว่ามอเตอร์แบบอะซิงโครนัสตามความเร็วแบบซิงโครนัสหรือเพียงแค่“ สามพันเมตร”

จากนั้นสลิปของมันจะเท่ากับ:
3000-2730*100%/3000=9%
ขอบเขตการใช้งาน
มอเตอร์ไฟฟ้าแบบอะซิงโครนัสพบการใช้งานในทุกกิจกรรมของมนุษย์ ผู้ที่ใช้พลังงานจากระยะหนึ่ง (จาก 220V) สามารถพบได้ในตัวกระตุ้นพลังงานต่ำหรือในเครื่องใช้ในครัวเรือนและเครื่องมือตัวอย่างเช่น:
- ในเครื่องซักผ้าประเภท "เด็ก" และรุ่นอื่น ๆ ของสหภาพโซเวียต
- ในเครื่องผสมคอนกรีต
- ในพัดลม
- ในประทุน;
- และแม้กระทั่งในเครื่องตัดหญ้าของส่วนราคาบน



ในการผลิตในเครือข่ายสามเฟส:
- วาล์วประตูอัตโนมัติ
- กลไกการยก (เครนและรอก);
- การระบายอากาศ;
- คอมเพรสเซอร์;
- เครื่องปั๊มน้ำ
- เครื่องจักรงานไม้และโลหะและอื่น ๆ




โฆษณานี้ยังใช้ในยานพาหนะไฟฟ้าและเมื่อเร็ว ๆ นี้มอเตอร์แบบอะซิงโครนัสที่มีขดลวดแบบสลาเวแกนกาและล้อรถที่เรียกว่า Duyunov โฆษณาบนอินเทอร์เน็ตซึ่งคุณสามารถดูได้จากวิดีโอของนักพัฒนา
ขอบเขตของมอเตอร์แบบอะซิงโครนัสนั้นกว้างใหญ่จนรายการเพียงอย่างเดียวจะยาวกว่าบทความนี้ดังนั้นช่างไฟฟ้าทุกคนควรรู้วิธีการทำงานสิ่งที่มันมีไว้ใช้และตำแหน่งที่ใช้ เพื่อสรุปและทำรายการข้อดีข้อเสียของอุปกรณ์เหล่านี้
ข้อดี:
- การก่อสร้างที่เรียบง่าย
- ราคาถูก.
- แทบจะไม่มีการบำรุงรักษา
ข้อเสียเปรียบหลักคือความยากลำบากในการปรับความเร็วเมื่อเทียบกับมอเตอร์ DC เดียวกันหรือเครื่องสะสมสากล ดังนั้นจึงเป็นเรื่องยากที่จะจัดระเบียบเครื่องเริ่มต้นที่ราบรื่นของเครื่องขนาดใหญ่และบ่อยครั้งสิ่งนี้จะทำด้วยความช่วยเหลือของเครื่องแปลงความถี่ที่มีราคาแพง
นี่คือที่เราจบด้วยการพิจารณาของมอเตอร์เหนี่ยวนำและขอบเขตของพวกเขา เราหวังว่าหลังจากอ่านบทความคุณจะเข้าใจว่ามันคืออะไรและเครื่องใช้ไฟฟ้านี้ทำงานอย่างไร!
วัสดุที่เกี่ยวข้อง:




