Što je DC-motor bez četkica, kako se gradi i radi
definicija
DC četkasti motor naziva se jednosmerni motor, čija se struja u namotima prebacuje posebnim prekidačem - naziva se "pokretač" ili "pretvarač", a ti se namoti uvijek nalaze na statoru. Prekidač se sastoji od 6 tranzistora, opskrbljuju strujom određenog namota, ovisno o položaju rotora.
U domaćoj literaturi takvi se motori nazivaju "ventilski" (jer se poluvodičke sklopke nazivaju "ventili"), a postoji električno strojno razdvajanje na dva tipa u obliku kontra-EMF-a. U inozemnoj literaturi takva razlika i dalje postoji, jedna od njih naziva se analogno ruskom „BLDC“ (četkica bez istosmjernog pogona ili motora), koja doslovno zvuči kao „četkica bez četkica“ u svojim namotima pojavljuje se trapezoidni EMF. Motori ventila sa sinusoidnim EMF-om nazivaju se PMSM (trajni magnetni sinkroni stroj), što u prijevodu znači "sinkroni elektromotor s pobudom stalnim magnetima".
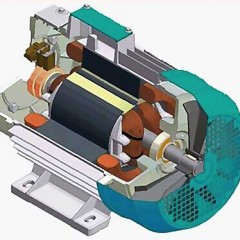
Uređaj i princip rada
Kolektor u KDPT služi kao čvor za prebacivanje struje u armaturnim namotima. U istosmjernom motoru bez četkica (BDT) tu ulogu ne igraju lamelirane četke, već komutator od njega poluvodičkim prekidačima - tranzistorima. Tranzistori prebacuju namota statora, stvarajući rotirajuće magnetsko polje koje djeluje na polje magneta rotora. A kad struja teče kroz vodič koji je u magnetskom polju, djeluje na njega Amperska sila, zbog djelovanja ove sile stvara se okretni moment na osovini električnih strojeva. Na tome se temelji princip rada bilo kojeg elektromotora.
 i bez četkica (desno)")
A sad da shvatimo kako motor bez četkica djeluje. 3 namota obično se nalaze na BDPT statoru, a analogno AC motorima često se nazivaju i trofaznim. To je dijelom točno: motori bez četkica rade na izvoru istosmjerne struje (obično iz baterija), ali regulator se naizmjence uključuje namotajima. Međutim, nije sasvim tačno reći da kroz namote teče naizmjenična struja. Konačni oblik namota naponskog napona formiran je pravokutnim kontrolnim impulsima tranzistora.
Trofazni motor bez četkica može biti trožilni ili četverožični, gdje je četvrta žica slavina od srednje točke (ako su namotaji povezani duž zvjezdani uzorak).

Namoti ili, jednostavnim riječima, zavojnice bakrene žice uklapaju se u zube jezgre statora. Ovisno o dizajnu i namjeni pogona, stator može imati različit broj zuba. Postoje različite mogućnosti raspodjele faznih namotaja duž zuba rotora, što je prikazano na sljedećoj slici.

Namota svakog zuba unutar jedne faze mogu se povezati serijski ili paralelno, ovisno o zadacima dizajnera dodijeljenim u pogledu snage i trenutka dizajniranog pogona, a sama fazna namota međusobno su povezana prema uzorku zvijezde ili trokuta, poput asinhron ili sinkroni trofazni izmjenični motori.

U stator se mogu ugraditi senzori položaja rotora. Često se koriste dvorani senzori, oni daju signal regulatoru kada na njih utječe magnetsko polje magneta rotora. To je neophodno kako bi regulator mogao "znati" u kojem je položaju rotor i napajati ga odgovarajućim namotima. Ovo je potrebno za povećanje učinkovitosti i stabilnosti rada, i ukratko, za istiskivanje sve moguće snage iz motora. Senzori su obično instalirali 3 komada. Ali prisutnost senzora komplicira uređaj motora bez četkica, oni trebaju provesti dodatne žice za naponske i podatkovne vodove.

U BDTT-u se za uzbuđenje koriste stalni magneti montirani na rotoru, a stator je sidro. Podsjetimo da je u skupljačkim strojevima obrnuto (rotor je sidro), a za pobuđivanje u CD-u koriste se stalni magneti i elektromagneti (namotaji).
Magneti su montirani s naizmjeničnim polovima, pa prema tome njihov broj određuje broj parova polova. Ali to ne znači da koliko magneta, nego onoliko parova polova. Nekoliko magneta može tvoriti jedan pol. Broj okretaja u minuti ovisi o broju polova, kao što je to slučaj s indukcijskim motorom (i drugim). To jest, s jednog regulatora na istim podešavanjima, bez četkanjem motori s različitim brojem parova pola rotiraju se različitim brzinama.

Vrste BDTT
Pogledajmo sada kakvi su motori sa stalnim magnetom bez četkica. Razvrstavaju se po obliku kontra-EMF, dizajnu, kao i po prisutnosti senzora položaja rotora. Dakle, postoje dvije glavne vrste koje se razlikuju u obliku kontra-EMF-a, koji se inducira u namotima kada se rotor okreće:
- BLDC - u njima trapezoidni anti-EMF;
- PMSM - sinusoidni anti-emf.
U idealnom slučaju potrebni su im različiti izvori napajanja (kontroleri), ali u praksi su zamjenjivi. Ali ako koristite regulator s pravokutnim ili trapezoidnim izlaznim naponom s PMSM motorom, čut ćete karakteristične zvukove, slične kucanju tijekom rotacije.
I prema dizajnu, DC motori bez četkica su:
- S unutarnjim rotorom. Ovo je poznatiji prikaz elektromotora, kada je stator tijelo, a osovina koja se nalazi u njemu rotira. Često ih nazivaju engleskom riječju "Inrunner". Ova se opcija obično koristi za električne motore velike brzine.
- S vanjskim rotorom. Ovdje se vanjski dio motora okreće s osovinom koja je pričvršćena na njega, u engleskim se izvorima naziva "outrunner". Ovaj krug uređaja koristi se kada vam treba visoki trenutak.
Dizajn se bira ovisno o tome zašto je motor bez četkica potreban u određenoj aplikaciji.
 i outrunner (desno)")
Moderna industrija proizvodi motore bez četkica sa i bez senzora položaja rotora. Činjenica je da postoji mnogo načina za upravljanje BDTT-om, za neke su potrebni senzori položaja, drugi određuju položaje prema EMF-u u namotima,treći jednostavno napajaju potrebne faze i motor se neovisno sinkronizira s takvim napajanjem i ulazi u režim rada.
Glavne karakteristike istosmjernih motora bez četkica:
- Način rada - dugačak ili kratak.
- Maksimalni radni napon.
- Maksimalna radna struja.
- Maksimalna snaga.
- Maksimalni obrtaji često označavaju ne okretaje, već KV - r / v, to jest broj okretaja na 1 volt primijenjenog napona (bez opterećenja na osovini). Da biste postigli maksimalnu brzinu - pomnožite ovaj broj s najvećim naponom.
- Otpor namatanja (što je manji, veća je učinkovitost), obično iznosi stotine i tisuće Ohma.
- Fazni napredni kut (vrijeme) je vrijeme nakon kojeg struja u namotu doseže svoj maksimum, to je zbog zakona induktivnosti i prebacivanja (struja u induktivnosti ne može se odmah promijeniti.
Dijagram ožičenja
Kao što je već spomenuto, za rad motora bez četkica potreban vam je poseban regulator. Na aliexpressu možete pronaći oba seta iz motora i kontrolera ili odvojeno. Regulator se naziva i motor ESC ili električni regulator brzine. Odabir je prema jačini struje danoj opterećenju.
Obično je spajanje elektromotora na regulator jednostavno i razumljivo je čak i lutkama. Glavna stvar koju trebate znati je da, da biste promijenili smjer vrtnje, morate promijeniti vezu bilo koje dvije faze, zapravo kao i kod trofaznih asinkronih ili sinkronih motora.

Mreža ima niz tehničkih rješenja i shema, složenih i za lutke, koje možete vidjeti dolje.
U ovom videu autor govori kako se sprijateljiti s motorom BC "Arduino".
I u ovom videu ćete naučiti o različitim načinima povezivanja na različite kontrolere i kako to možete učiniti sami. Autor to demonstrira na primjeru motora s tvrdog diska i par snažnih instanci - inrunner i outrunner.
Usput, za ponavljanje primjenjujemo i dijagram iz videa:

Gdje se koriste motori bez četkica
Opseg takvih elektromotora je ispred planiranja. Koriste se za pokretanje malih mehanizama: u CD pogonima, DVD pogonima, hard diskovima i u moćnim uređajima: baterija i električni alat (s napajanjem od oko 12 V), radio-upravljani modeli (na primjer, quadrocopters), CNC strojevi za pogon radnog tijela (obično motori s nazivnim naponom od 24 V ili 48 V).
BDTT se naširoko koriste u električnim vozilima, gotovo svi moderni motorni kotači električnih skutera, bicikala, motocikala i automobila su motori bez četkica. Usput, nazivni napon elektromotora za transport leži u širokom rasponu, na primjer, motor na kotačima s biciklom često radi od 36 V ili 48 V, s rijetkim iznimkama i više, a u automobilima je, primjerice, Toyota Prius oko 120 V, a na Nissanu Leaf - dolazi do 400, dok se puni s mreže 220V (to se provodi pomoću ugrađenog pretvarača).
Zapravo, opseg elektromotora bez četkica je vrlo opsežan, odsutnost sabirnog čvora omogućuje njegovu upotrebu na opasnim mjestima, kao i na mjestima s visokom vlagom, bez straha od kratkog spoja, iskrenja ili požara zbog oštećenja u sastavu četke. Zbog svoje visoke učinkovitosti i dobrih ukupnih dimenzija, našli su primjenu u svemirskoj industriji.
Prednosti i nedostaci
DC motori bez četkica, kao i drugi tipovi električnih strojeva, imaju određene prednosti i nedostatke.
Prednosti BDTT su sljedeće:
- Zahvaljujući uzbuđivanju moćnih trajnih magneta (na primjer, neodim), oni su superiorniji u okretnom momentu i snazi i imaju manje dimenzije od indukcijskih motora. Ono što koristi većina proizvođača električnih vozila - od skutera do automobila.
- Ne postoji skup skupljača četki za iskrenje koji zahtijeva redovito održavanje.
- Kada koriste visokokvalitetni kontroler, za razliku od istog CD-a, oni ne ometaju napajanje mrežom, što je posebno važno u radio-kontroliranim uređajima i vozilima s naprednom elektroničkom opremom u ugrađenoj mreži.
- Učinkovitost veća od 80, češće i 90%.
- Velika brzina rotacije, u nekim slučajevima i do 100 000 okr / min.
Ali postoji značajan minus: motor bez četkica bez regulatora samo je komad željeza s bakrenim namotom. Neće moći raditi. Kontroleri nisu jeftini i najčešće ih je potrebno naručiti u internetskim trgovinama ili s aliexpressom. Zbog toga upotreba BC motora u domaćim modelima i uređajima nije uvijek moguća.
Sada znate što je DC motor bez četkica, kako djeluje i gdje se koristi. Nadamo se da vam je naš članak pomogao da riješite sva pitanja!
Srodni materijali:




Pa, na kraju krajeva, postoje ljudi koji ne samo da poznaju materijal, već ih je Bog nadarovao i sposobnošću da ih inteligentno, razumljivo i ne dosadi izložiti!
Čitam kao cool detektiv!
Veliko hvala autoru na članku, svakom uspjehu i svemu najboljem u životu!
👍👍👍👍👍👍👍👍👍👍👍👍👍👍
Slažem se sa svime osim jednog. Na priusu je redoviti asinhroni 17 kW pri 380v bateriji koji daje 288 konstante. Pa, onda malo elektronike i krenimo