Što je sinkroni motor i gdje se koristi
Sinhroni elektromotorni motori (SD) nisu tako uobičajeni kao asinkroni motori u kavezu vjeverica. Ali koriste se tamo gdje je potreban veliki zakretni moment i za vrijeme rada učestali preopterećenje, Također, ova vrsta motora koristi se tamo gdje je potrebna velika snaga za pogon mehanizama, zbog visokog faktora snage i mogućnosti poboljšanja faktora snage mreže, što će značajno smanjiti troškove električne energije i opterećenja na vodi. Što je sinkroni motor, gdje se koristi i koji su njegovi prednosti i nedostaci razmotrit ćemo u ovom članku.
Definicija i princip djelovanja
Jednostavno rečeno, sinkronim motorom naziva se elektromotor čija se brzina rotacije rotora (osovine) podudara s brzinom vrtnje magnetskog polja statora.
Razmotrimo ukratko princip rada takvog elektromotora - temelji se na interakciji rotirajućeg magnetskog polja statora, koje se obično stvara trofaznom izmjeničnom strujom i konstantnim magnetskim poljem rotora.
Stalno magnetsko polje rotora stvara se uzbudnim namotom ili stalnim magnetima. Struja u namotima statora stvara rotirajuće magnetsko polje, dok je rotor u režimu rada stalni magnet, njegovi polovi naleću na suprotne polove magnetskog polja statora. Kao rezultat toga, rotor se rotira sinkrono sa statorevim poljem, što je njegova glavna karakteristika.
Podsjetimo to indukcijski motor brzina vrtnje statora MP i brzina vrtnje rotora razlikuju se po količini proklizavanja, a njegove mehaničke karakteristike su „nabreknute“ s vrhom tijekom kritičnog klizanja (ispod njegove nazivne brzine vrtnje).
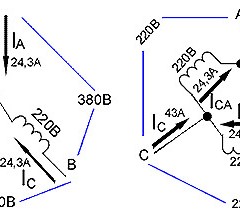
Brzina kojom se magnetno polje statora rotira može se izračunati pomoću sljedeće jednadžbe:
N = 60f / p
f je frekvencija struje u namotu, Hz, p je broj parova polova.
U skladu s tim, brzina rotacije vratila sinkronog motora određena je istom formulom.
Većina elektromotora izmjeničnih struja koji se koriste u proizvodnji izrađeni su bez stalnih magneta, ali s navijanjem uzbude, dok su sinkroni izmjenični motori male snage izrađeni sa trajnim magnetima na rotoru.
Struja do poljskog namota napaja se prstenovima i sklopom četke. Za razliku od električnog motora na kolektoru, gdje se kolektor (skup uzdužno postavljenih ploča) koristi za prijenos struje na rotirajuću zavojnicu, prstenovi su montirani na sinhrono preko jednog kraja statora.
Tiristorski pobudnici, često nazvani "VTE" (po nazivu jednog od niza takvih uređaja domaće proizvodnje), trenutno su izvor pobude istosmjerne struje.Ranije se koristio sustav pobuđivanja motora-motora, kada je generator postavljen u istu osovinu s motorom (također je uzbudnik), otpornici primijenjena struja na terensko navijanje.
Rotor gotovo svih sinkronih istosmjernih motora izvodi se bez uzbudnog namota, a s trajnim magnetima, iako su u principu slični izmjeničnim LED diodama, oni se razlikuju po načinu na koji su povezani i upravljani od klasičnih trofaznih strojeva.
Jedna od glavnih karakteristika elektromotora je mehanička karakteristika. Ona sinkroni motore u blizini ravno vodoravnom linijom. To znači da opterećenje osovine ne utječe na njegovu brzinu (dok ne postigne neku kritičnu vrijednost).
 asinkronih i b) sinkronih motora")
To se postiže upravo zahvaljujući pobuđivanju istosmjerne struje, stoga sinkroni elektromotor savršeno održava stalne okrete pod promjenom opterećenja, preopterećenja i pada napona (do određene granice).
Ispod vidite simbol na dijagramu sinkronog stroja.

Dizajn rotora
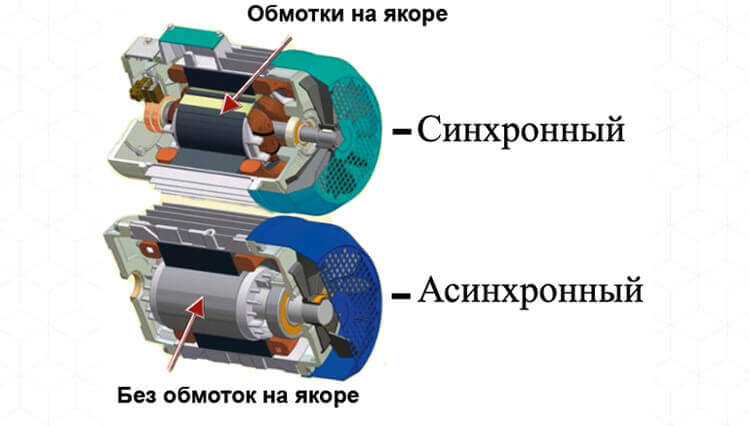
Kao i bilo koji drugi, sinkroni elektromotor sastoji se od dva glavna dijela:
- Stator. Namota su smještena u njemu. Naziva se i sidrom.
- Rotor. Na njemu su ugrađeni stalni magneti ili uzbudno navijanje. Naziva se i induktorom, zbog svoje svrhe - stvaranja magnetskog polja).
Za napajanje struje poljskim namotom na rotor su ugrađena 2 prstena (budući da je uzbuđenje jednosmernom strujom, "+" se dovodi na jedan od njih, a "-" na drugi. Četke su pričvršćene na držač četke.

Rotori sinkronih izmjeničnih motora su dvije vrste, ovisno o namjeni:
- Izričito polarno. Stupovi (zavojnice) su jasno vidljivi. Koristite pri malim brzinama i velikom broju polova.
- Implicitno - izgleda poput okrugle praznine, u utoru na kojem su položene žice namota. Koristite pri velikim brzinama vrtnje (3000, 1500 okr / min) i malom broju polova.

Sinkroni start motora
Značajka ove vrste električnih strojeva je ta da se ona ne može jednostavno povezati s mrežom i čekati njeno pokretanje. Osim toga, za rad LED-a nije potreban samo izvor uzbudne struje, on ima i prilično kompliciran startni krug.

Puštanje u pogon događa se kao u indukcijskom motoru, a kako bi se stvorio početni trenutak, pored terenskog namotavanja, na rotor se postavlja dodatno kratkotrajno namotavanje „kaveza vjeverice“. Naziva se i navijanjem "prigušivanje", jer povećava stabilnost pri naglim preopterećenjima.
Struja pobude u namotu rotora pri pokretanju je odsutna, a kad ubrzava do subhronske brzine (3-5% manje od sinkrone), primjenjuje se pobudna struja, nakon čega ona i stator struje osciliraju, motor ulazi u sinkronizam i ulazi u radni režim.
Da bi ograničili startne struje moćnih strojeva, ponekad smanjuju napon na stezaljkama namota statora spajanjem serijski autotransformatora ili otpornika.
Dok se sinkroni stroj pokreće u asinhronom načinu, otpornici su spojeni na terensko navijanje, čiji otpor premašuje otpor samog navijanja za 5-10 puta. To je potrebno tako da pulsirajući magnetski tok koji nastaje pod djelovanjem struja induciranih u namotu tijekom pokretanja ne usporava ubrzanje, a isto tako da ne ošteti namotaje uslijed emfrirane emf.
vrste
Postoji puno vrsta takvih strojeva, gore je opisan dizajn sinkronog izmjeničnog električnog motora s poljskim namotima, kao najčešće u proizvodnji. Postoje i druge vrste, poput:
- Sinhroni motori sa stalnim magnetom. Riječ je o raznim elektromotorima, poput PMSM - sinhronog motora s trajnim magnetom, BLDC - bez četkica sa direktnom strujom i drugih. Razlike između kojih se sastoji u načinu upravljanja i obliku struje (sinusoidna ili trapezoidna). Nazivaju ih i motorima bez četkica ili bez četkica.Koristi se u alatnim strojevima, radio kontroliranim modelima, električnim alatima itd. Oni ne rade izravno iz istosmjerne struje, već kroz poseban pretvarač.
- Steperski motori - sinkroni motori bez četkica, u kojima rotor precizno drži navedeni položaj, koriste se za pozicioniranje radnog alata u CNC strojevima i za upravljanje raznim elementima automatskih sustava (na primjer, položaj ventila za leptir za gas u automobilu). Sastoje se od statora, u ovom slučaju na njemu se nalaze namotaji uzbude, i rotora, koji je izrađen od magnetski mekog ili magnetsko tvrdog materijala. Konstrukcijski vrlo slične prethodnim tipovima.
- Reaktivni.
- Histereza.
- Reaktivna histereza.
Posljednje tri vrste LED-ova također nemaju četke, rade zbog posebnog dizajna rotora. Reaktivne LED diode razlikuju tri dizajna: poprečno slojeviti rotor, rotor s izrazitim polovima i aksijalno stratificirani rotor. Objašnjenje principa njihovog rada prilično je komplicirano i trebaće mnogo, pa ćemo ga izostaviti. U praksi se vjerojatno rijetko susrećete s takvim elektromotorima. To su uglavnom strojevi male snage koji se koriste u automatizaciji.

Obim primjene
Sinhroni motori skuplji su od asinkronih, osim toga zahtijevaju dodatni izvor pobuđivanja istosmjerne struje - što dijelom smanjuje širinu djelokruga ove vrste električnih strojeva. Međutim, sinkroni elektromotori koriste se za pokretanje mehanizama tamo gdje su moguća preopterećenja i potrebno je precizno održavanje stabilnih obrtaja.

Štoviše, najčešće se koriste u polju velikih kapaciteta - stotine kilovata i jedinica megavata, a istodobno su pokretanje i zaustavljanje prilično rijetki, to jest, strojevi rade danonoćno. Ta je aplikacija posljedica činjenice da sinkroni strojevi rade s cos F phi blizu 1 i mogu dostavljati reaktivnu snagu mreži, što poboljšava faktor snage mreže i smanjuje njenu potrošnju, što je važno za poduzeća.
Prednosti i nedostatci
Jednostavnim riječima, onda svaki električni automobil ima svoje prednosti i nedostatke. Prednosti sinkronog motora su:
- Rad s cosPhI = 1, zbog uzbuđenja istosmjerne struje, odnosno, oni ne troše jalove snage iz mreže.
- Tijekom rada, s prekomjernim pobuđivanjem, oni daju reaktivnu snagu mreži, poboljšavajući faktor snage mreže, pad napona i gubitke u njoj, a CM generatora elektrana raste.
- Maksimalni trenutak razvijen na osovini LED-a proporcionalan je U, a za AD - U² (kvadratna ovisnost o naponu). To znači da LED ima dobru nosivost i stabilnost, koji se čuvaju tijekom pada napona u mreži.
- Kao posljedica svega toga, brzina rotacije je stabilna tijekom preopterećenja i propadanja, unutar kapaciteta preopterećenja, posebno s povećanjem pobudne struje.
Međutim, značajan nedostatak sinkronog motora je taj što je njegov dizajn složeniji od dizajna asinkronog s rotorom kratkog spoja, potreban je uzbudnik, bez kojeg on ne može raditi. Sve to dovodi do većih troškova u odnosu na asinhrone strojeve i poteškoća u održavanju i radu.
Možda su tu prednosti i nedostaci sinkronih motora. U ovom smo članku pokušali sažeti opće podatke o sinkronim motorima. Ako imate nešto za nadopunu materijala - napišite u komentarima.
Srodni materijali: