¿Qué es un motor de CC sin escobillas, cómo está construido y funcionando?
Definición
Un motor de corriente continua sin escobillas se denomina motor de corriente continua, cuya corriente en los devanados se conmuta mediante un dispositivo de conmutación especial: se denomina "controlador" o "inversor" y estos devanados siempre se encuentran en el estator. El interruptor consta de 6 transistores, que suministran corriente a un devanado particular, dependiendo de la posición del rotor.
En la literatura nacional, estos motores se denominan "válvulas" (porque los interruptores semiconductores se denominan "válvulas"), y existe una separación de tales máquinas eléctricas en dos tipos en forma de contra-EMF. En la literatura extranjera, tal diferencia persiste, uno de ellos se llama análogamente al "BLDC" ruso (motor o motor de corriente continua sin escobillas), que literalmente suena como "motor DC sin escobillas" en sus devanados, aparece un EMF trapezoidal. Los motores de válvula con un EMF sinusoidal se denominan PMSM (máquina síncrona de imán permanente), que se traduce como "motor eléctrico síncrono con excitación por imanes permanentes".
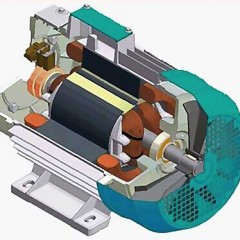
El dispositivo y el principio de funcionamiento.
El colector en el KDPT sirve como un nodo para cambiar la corriente en los devanados del inducido. En un motor de corriente continua sin escobillas (BDT), este papel no lo desempeñan los cepillos de láminas, sino el conmutador del mismo mediante interruptores semiconductores: transistores. Los transistores cambian los devanados del estator, creando un campo magnético giratorio que interactúa con el campo del imán del rotor. Y cuando la corriente fluye a través de un conductor que está en un campo magnético, actúa sobre él La fuerza de amperiosDebido a la acción de esta fuerza, se genera un par en el eje de las máquinas eléctricas. El principio de funcionamiento de cualquier motor eléctrico se basa en esto.
 y del motor sin escobillas (derecha)")
Ahora veamos cómo funciona el motor sin escobillas. Los 3 devanados generalmente se encuentran en el estator BDPT, por analogía con los motores de CA, a menudo se los llama trifásicos. Esto es en parte cierto: los motores sin escobillas funcionan con una fuente de corriente continua (a menudo de baterías), pero el controlador enciende los devanados alternativamente. Sin embargo, no es del todo cierto decir que la corriente alterna fluye a través de los devanados. La forma final del devanado de tensión de alimentación está formada por pulsos de control de transistor rectangulares.
Un motor sin escobillas trifásico puede ser de tres o cuatro hilos, donde el cuarto cable es una derivación desde el punto medio (si los devanados están conectados a lo largo patrón de estrella).

Enrollamientos o, en palabras simples, bobinas de alambre de cobre encajan en los dientes del núcleo del estator. Dependiendo del diseño y el propósito del accionamiento, el estator puede tener un número diferente de dientes. Existen diferentes opciones para la distribución de bobinados de fase a lo largo de los dientes del rotor, como se ilustra en la siguiente figura.

Los devanados de cada uno de los dientes dentro de una fase se pueden conectar en serie o en paralelo, dependiendo de las tareas asignadas al diseñador en términos de potencia y el momento del accionamiento diseñado, y los devanados de fase están interconectados de acuerdo con el patrón de una estrella o un triángulo, como asincrónico o síncrono Motores trifásicos de corriente alterna.

Los sensores de posición del rotor se pueden instalar en el estator. Los sensores Hall a menudo se utilizan, dan una señal al controlador cuando se ven afectados por el campo magnético de los imanes del rotor. Esto es necesario para que el controlador "sepa" en qué posición está el rotor y para suministrar energía a los devanados correspondientes. Esto es necesario para aumentar la eficiencia y la estabilidad del trabajo y, en resumen, para exprimir toda la potencia posible del motor. Los sensores suelen instalarse 3 piezas. Pero la presencia de sensores complica el dispositivo de un motor sin escobillas, necesitan conducir cables adicionales para las líneas de alimentación y datos.

En el BDTT, los imanes permanentes montados en el rotor se utilizan para la excitación, y el estator es un ancla. Recuerde que en las máquinas recolectoras es al revés (el rotor es un ancla), y para la excitación en el CD, se utilizan tanto imanes permanentes como electroimanes (bobinados).
Los imanes se montan con polos alternos y, en consecuencia, su número determina el número de pares de polos. Pero esto no significa cuántos imanes, luego tantos pares de polos. Varios imanes pueden formar un polo. El número de revoluciones por minuto depende del número de polos, como es el caso de un motor de inducción (y otros). Es decir, desde un controlador con la misma configuración, los motores sin escobillas con un número diferente de pares de polos rotarán a diferentes velocidades.

Tipos de BDTT
Ahora veamos cómo son los motores de imanes permanentes sin escobillas. Se clasifican por la forma del contador EMF, el diseño, así como por la presencia de sensores de posición del rotor. Entonces, hay dos tipos principales que difieren en la forma de contra-EMF, que se induce en los devanados cuando el rotor gira:
- BLDC - en ellos un trapezoidal anti-EMF;
- PMSM - anti-fem sinusoidal.
Idealmente, necesitan diferentes fuentes de energía (controladores), pero en la práctica son intercambiables. Pero si usa un controlador con un voltaje de salida rectangular o trapezoidal con un motor PMSM, escuchará sonidos característicos, similares a un golpe durante la rotación.
Y por diseño, los motores de CC sin escobillas son:
- Con un rotor interno. Esta es una representación más familiar del motor eléctrico, cuando el estator es un cuerpo y el eje ubicado en él gira. A menudo se les llama la palabra inglesa "Inrunner". Esta opción se usa generalmente para motores eléctricos de alta velocidad.
- Con un rotor externo. Aquí, la parte exterior del motor gira con un eje fijado a él, en fuentes inglesas se llama "outrunner". Este circuito de dispositivo se usa cuando necesita un momento elevado.
El diseño se elige dependiendo de por qué se necesita un motor sin escobillas en una aplicación particular.
 y outtrunner (derecha)")
La industria moderna produce motores sin escobillas con y sin sensores de posición del rotor. El hecho es que hay muchas formas de controlar el BDTT, para algunos de ellos se necesitan sensores de posición, otros determinan las posiciones por EMF en los devanados,los terceros simplemente suministran energía a las fases necesarias y el motor eléctrico se sincroniza independientemente con dicha fuente de alimentación y entra en modo de operación.
Características principales de los motores de corriente continua sin escobillas:
- Modo de funcionamiento: largo o corto.
- Tensión máxima de funcionamiento.
- Máxima corriente de trabajo.
- Máxima potencia.
- Las revoluciones máximas, a menudo indican no revoluciones, sino KV - r / v, es decir, el número de revoluciones por 1 voltio del voltaje aplicado (sin carga en el eje). Para obtener la velocidad máxima, multiplique este número por el voltaje máximo.
- La resistencia del devanado (cuanto más pequeña es, mayor es la eficiencia), generalmente asciende a centésimas y milésimas de Ohm.
- El ángulo de avance de fase (sincronización) es el tiempo después del cual la corriente en el devanado alcanza su máximo, esto se debe a su inductancia y leyes de conmutación (la corriente en la inductancia no puede cambiar instantáneamente.
Diagrama de cableado
Como se mencionó anteriormente, para el funcionamiento de un motor sin escobillas necesita un controlador especial. En aliexpress, puede encontrar ambos kits del motor y el controlador, o por separado. El controlador también se llama ESC Motor o Electric Speed Controller. Se seleccionan por la fuerza de la corriente dada a la carga.
Por lo general, conectar el motor eléctrico al controlador es sencillo y es comprensible incluso para tontos. Lo principal que necesita saber es que para cambiar la dirección de rotación, debe cambiar la conexión de cualquiera de las dos fases, de hecho, así como en motores asíncronos o síncronos trifásicos.

La red tiene una serie de soluciones y esquemas técnicos, tanto complejos como para tontos, que puede ver a continuación.
En este video, el autor cuenta cómo hacer amigos con el motor BC "Arduino".
Y en este video aprenderá sobre diferentes formas de conectarse a diferentes controladores y cómo puede hacerlo usted mismo. El autor demuestra esto con un ejemplo de un motor de HDD, y un par de instancias poderosas: inrunner y outrunner.
Por cierto, también aplicamos el diagrama del video para la repetición:

Donde se utilizan motores sin escobillas
El alcance de tales motores eléctricos está por delante de toda la programación. Se utilizan tanto para manejar mecanismos pequeños: en unidades de CD, unidades de DVD, discos duros y en dispositivos potentes: una batería y una herramienta eléctrica (con una fuente de alimentación de aproximadamente 12 V), modelos controlados por radio (por ejemplo, quadrocopters), máquinas CNC para conducir un cuerpo de trabajo (generalmente motores con un voltaje nominal de 24 V o 48 V).
Los BDTT son ampliamente utilizados en vehículos eléctricos, casi todas las ruedas motrices modernas de scooters eléctricos, bicicletas, motocicletas y automóviles son motores sin escobillas. Por cierto, el voltaje nominal de los motores eléctricos para el transporte se encuentra en un amplio rango, por ejemplo, el motor de la rueda de bicicleta a menudo funciona desde 36V o 48V, con raras excepciones y más, y en automóviles, por ejemplo, en el Toyota Prius de aproximadamente 120V y en el Nissan Leaf - llega a 400, mientras se carga desde una red de 220V (esto se implementa usando el convertidor incorporado).
De hecho, el alcance de los motores eléctricos sin escobillas es muy extenso, la ausencia de un nodo colector permite su uso en lugares peligrosos, así como en lugares con alta humedad, sin temor a cortocircuitos, arcos o incendios debido a defectos en el conjunto del cepillo. Debido a su alta eficiencia y buenas dimensiones generales, han encontrado aplicación en la industria espacial.
Ventajas y desventajas.
Los motores de CC sin escobillas, como otros tipos de máquinas eléctricas, tienen ciertas ventajas y desventajas.
Las ventajas de la BDTT son las siguientes:
- Gracias a la excitación por potentes imanes permanentes (neodimio, por ejemplo), son superiores en par y potencia y tienen dimensiones más pequeñas que los motores de inducción. Lo que utilizan la mayoría de los fabricantes de vehículos eléctricos, desde scooters hasta automóviles.
- No hay un conjunto de colector de escobillas que requiera mantenimiento regular.
- Cuando se utiliza un controlador de alta calidad, a diferencia del mismo CD, no interfieren con la red de suministro de energía, lo cual es especialmente importante en dispositivos controlados por radio y vehículos con equipos electrónicos avanzados en la red a bordo.
- Eficiencia más de 80, más a menudo y 90%.
- Alta velocidad de rotación, en algunos casos hasta 100.000 rpm.
Pero hay una desventaja significativa: un motor sin escobillas sin controlador es solo una pieza de hierro con un devanado de cobre. No podrá trabajar. Los controladores no son baratos y la mayoría de las veces se deben pedir en tiendas en línea o con aliexpress. Debido a esto, no siempre es posible utilizar motores BC en modelos y dispositivos caseros.
Ahora ya sabe qué es un motor de CC sin escobillas, cómo funciona y dónde se utiliza. ¡Esperamos que nuestro artículo te haya ayudado a resolver todos los problemas!
Materiales relacionados:




Bueno, después de todo, ¡hay personas que no solo conocen el material, sino que también están dotados por Dios con la capacidad de ser inteligentes, inteligibles y no aburridos de exponerlo!
¡Leo como un detective genial!
¡Muchas gracias al autor por el artículo, todo éxito y todo lo mejor en la vida!
👍👍👍👍👍👍👍👍👍👍👍👍👍👍
Estoy de acuerdo con todo excepto uno. En el Prius hay una batería asíncrona regular de 17 kW a 380v que da 288 constantes. Bueno, entonces un poco de electrónica y vámonos