What is a synchronous motor and where is it used
Synchronous electric motors (SD) are not as common as asynchronous squirrel-cage motors. But they are used where a large torque is needed and during the work frequent overload. Also, this type of engine is used where large power is needed to drive the mechanisms, due to the high power factor and the ability to improve the power factor of the network, which will significantly reduce the cost of electricity and load on the line. What is a synchronous motor, where is it used and what are its pros and cons we will consider in this article.
Definition and principle of action
In simple terms, a synchronous motor is called an electric motor whose rotational speed of the rotor (shaft) coincides with the rotational speed of the stator magnetic field.
Let us briefly consider the principle of operation of such an electric motor - it is based on the interaction of the rotating stator magnetic field, which is usually created by three-phase alternating current and the constant magnetic field of the rotor.
The constant magnetic field of the rotor is created by the excitation winding or permanent magnets. The current in the stator windings creates a rotating magnetic field, while the rotor in the operating mode is a permanent magnet, its poles rush to the opposite poles of the stator magnetic field. As a result, the rotor rotates synchronously with the stator field, which is its main feature.
Recall that induction motor the stator MP rotational speed and rotor rotational speed differ by the amount of slip, and its mechanical characteristic is “humped” with a peak during critical slip (below its nominal rotation speed).
The speed with which the stator magnetic field rotates can be calculated using the following equation:
N = 60f / p
f is the frequency of the current in the winding, Hz, p is the number of pairs of poles.
Accordingly, the rotation speed of the synchronous motor shaft is determined by the same formula.
Most AC electric motors used in production are made without permanent magnets, but with an excitation winding, while low-power synchronous AC motors are made with permanent magnets on the rotor.
The current to the field winding is supplied by rings and a brush assembly. Unlike a collector electric motor, where a collector (a set of longitudinally arranged plates) is used to transmit current to a rotating coil, rings are mounted on the synchronous across one end of the stator.
Thyristor exciters, often called "VTE" (by the name of one of the series of such devices of domestic production) are currently the source of direct current excitation.Previously, the generator-engine excitation system was used, when a generator was installed on the same shaft with the engine (it is also an exciter), which resistors applied current to the field winding.
The rotor of almost all synchronous DC motors is performed without an excitation winding, and with permanent magnets, although they are similar in principle to AC LEDs, they are very different in terms of how they are connected and controlled from classic three-phase machines.
One of the main characteristics of an electric motor is a mechanical characteristic. She synchronous motors close to a straight horizontal line. This means that the load on the shaft does not affect its speed (until it reaches some critical value).
 asynchronous and b) synchronous motors")
This is achieved precisely due to direct current excitation; therefore, the synchronous electric motor perfectly maintains constant revolutions under changing loads, overloads and voltage drops (up to a certain limit).
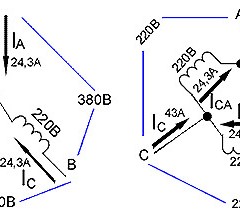
Below you see the symbol on the diagram of the synchronous machine.

Rotor design
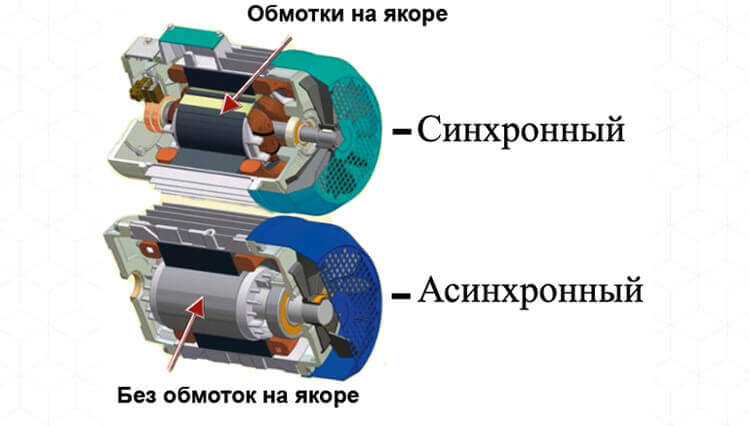
Like any other, a synchronous electric motor consists of two main parts:
- Stator. The windings are located in it. It is also called an anchor.
- Rotor. Permanent magnets or an excitation winding are installed on it. It is also called an inductor, because of its purpose - to create a magnetic field).
To supply current to the field winding, 2 rings are installed on the rotor (since the excitation is direct current, “+” is supplied to one of them, and “-” to the other). Brushes are attached to the brush holder.

The rotors of synchronous AC motors are of two types, depending on the purpose:
- Explicitly polar. Poles (coils) are clearly visible. Use at low speeds and a large number of poles.
- Implicit - it looks like a round blank, in the slot on which the wires of the windings are laid. Use at high speeds of rotation (3000, 1500 rpm) and a small number of poles.

Synchronous motor start
A feature of this type of electric machines is that it cannot simply be connected to the network and waiting for its launch. In addition, for the operation of the LED, not only the source of the excitation current is needed, it also has a rather complicated start-up circuit.

The start-up occurs as in an induction motor, and to create a starting moment, in addition to the field winding, an additional short-circuited “squirrel cage” winding is placed on the rotor. It is also called a “damping” winding, because it increases stability during sudden overloads.
There is no excitation current in the rotor winding at start-up, and when it accelerates to a sub-synchronous speed (3-5% less than synchronous), the excitation current is applied, after which it and the stator current oscillate, the motor enters synchronism and enters the operating mode.
To limit the starting currents of powerful machines, sometimes they reduce the voltage at the terminals of the stator windings by connecting an autotransformer or resistors in series.
While the synchronous machine starts in asynchronous mode, resistors are connected to the field winding, the resistance of which exceeds the resistance of the winding itself by 5-10 times. This is necessary so that the pulsating magnetic flux arising under the action of the currents induced in the winding during start-up does not slow down the acceleration, and also so as not to damage the windings due to the emf induced in it.
Views
There are a lot of types of such machines, the design of a synchronous alternating current motor with excitation windings, as the most common in production, was described above. There are other types, such as:
- Permanent magnet synchronous motors. These are various electric motors, such as PMSM - permanent magnet synchronous motor, BLDC - Brushless Direct Current and others. Differences between which consist in the control method and the shape of the current (sinusoidal or trapezoidal). They are also called brushless or brushless motors.Used in machine tools, radio-controlled models, power tools, etc. They do not work directly from direct current, but through a special converter.
- Stepper motors - synchronous brushless motors, in which the rotor precisely holds the specified position, they are used to position the working tool in the CNC machines and to control various elements of automatic systems (for example, the position of the throttle valve in the car). They consist of a stator, in this case, excitation windings are located on it, and a rotor, which is made of magnetically soft or magnetically hard material. Structurally very similar to the previous types.
- Reactive.
- Hysteresis.
- Reactive hysteresis.
The last three types of LEDs also do not have brushes, they work due to the special design of the rotor. Reactive LEDs distinguish three of their designs: a transversely stratified rotor, a rotor with distinct poles, and an axially stratified rotor. An explanation of the principle of their work is quite complicated, and will take a large amount, so we will omit it. Such motors in practice, you are likely to meet infrequently. These are mainly low-power machines used in automation.

Scope of application
Synchronous motors are more expensive than asynchronous, in addition they require an additional source of direct current excitation - this partly reduces the width of the scope of this type of electric machines. However, synchronous electric motors are used to drive mechanisms where overloads are possible and precise maintenance of stable revolutions is required.

Moreover, they are most often used in the field of large capacities - hundreds of kilowatts and units of megawatts, and at the same time, starting and stopping are rather rare, that is, the machines work around the clock for a long time. This application is due to the fact that synchronous machines operate with cos Ф phi close to 1, and can deliver reactive power to the network, which improves the power factor of the network and reduces its consumption, which is important for enterprises.
Advantages and disadvantages
In simple words, then any electric car has its pros and cons. The advantages of a synchronous motor are:
- Work with cosPhI = 1, due to direct current excitation, respectively, they do not consume reactive power from the network.
- During operation, with overexcitation, they give reactive power to the network, improving the power factor of the network, the voltage drop and losses in it, and the CM of the generators of power plants increases.
- The maximum moment developed on the shaft of the LED is proportional to U, and for the AD - U² (quadratic dependence on voltage). This means that the LED has good load capacity and stability, which are preserved during a voltage drop in the network.
- As a consequence of all this, the rotation speed is stable during overloads and subsidence, within the overload capacity, especially with increasing excitation current.
However, a significant drawback of a synchronous motor is that its design is more complicated than that of an asynchronous with a short-circuited rotor; an exciter is needed, without which it cannot work. All this leads to a higher cost compared to asynchronous machines and difficulties in maintenance and operation.
Perhaps the advantages and disadvantages of synchronous motors end there. In this article, we have tried to summarize general information about synchronous motors. If you have something to supplement the material - write in the comments.
Related materials: