Was ist ein Synchronmotor und wo wird er eingesetzt?
Synchrone Elektromotoren (SD) sind nicht so häufig wie asynchrone Käfigläufermotoren. Sie werden jedoch dort eingesetzt, wo ein großes Drehmoment benötigt wird und während der Arbeit häufig Überlast. Dieser Motortyp wird auch dort eingesetzt, wo aufgrund des hohen Leistungsfaktors und der Fähigkeit, den Leistungsfaktor des Netzwerks zu verbessern, eine große Leistung zum Antreiben der Mechanismen benötigt wird, wodurch die Kosten für Strom und Last auf der Leitung erheblich gesenkt werden. Was ist ein Synchronmotor, wo wird er verwendet und welche Vor- und Nachteile haben wir in diesem Artikel?
Definition und Wirkprinzip
In einfachen Worten wird ein Synchronmotor als Elektromotor bezeichnet, bei dem die Drehzahl des Rotors (der Welle) mit der Drehzahl des Statormagnetfelds übereinstimmt.
Betrachten wir kurz das Funktionsprinzip eines solchen Elektromotors - es basiert auf der Wechselwirkung eines rotierenden Statormagnetfelds, das üblicherweise durch einen dreiphasigen Wechselstrom und ein konstantes Magnetfeld des Rotors erzeugt wird.
Das konstante Magnetfeld des Rotors wird durch die Erregerwicklung oder Permanentmagnete erzeugt. Der Strom in den Statorwicklungen erzeugt ein rotierendes Magnetfeld, während der Rotor im Betriebsmodus ein Permanentmagnet ist und seine Pole zu den entgegengesetzten Polen des Statormagnetfelds strömen. Infolgedessen dreht sich der Rotor synchron mit dem Statorfeld, was sein Hauptmerkmal ist.
Erinnere dich daran Induktionsmotor Die Stator-MP-Drehzahl und die Rotordrehzahl unterscheiden sich durch die Schlupfmenge, und ihre mechanischen Eigenschaften werden während des kritischen Schlupfes (unterhalb ihrer Nenndrehzahl) mit einer Spitze „buckelig“.
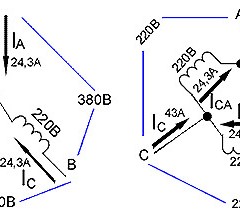
Die Geschwindigkeit, mit der sich das Statormagnetfeld dreht, kann unter Verwendung der folgenden Gleichung berechnet werden:
N = 60f / p
f ist die Frequenz des Stroms in der Wicklung, Hz, p ist die Anzahl der Polpaare.
Dementsprechend wird die Drehzahl der Synchronmotorwelle nach der gleichen Formel bestimmt.
Die meisten in der Produktion verwendeten Wechselstrommotoren werden ohne Permanentmagnete, jedoch mit einer Erregerwicklung hergestellt, während Synchron-Wechselstrommotoren mit geringer Leistung mit Permanentmagneten am Rotor hergestellt werden.
Der Strom zur Feldwicklung wird durch Ringe und eine Bürstenanordnung geliefert. Im Gegensatz zu einem Kollektor-Elektromotor, bei dem ein Kollektor (ein Satz in Längsrichtung angeordneter Platten) zum Übertragen von Strom zu einer rotierenden Spule verwendet wird, sind Ringe an einem Ende des Stators synchron angebracht.
Thyristor-Erreger, oft als "VTE" bezeichnet (mit dem Namen einer der Serien solcher Geräte der Haushaltsproduktion), sind derzeit die Quelle der Gleichstromanregung.Zuvor wurde das Generator-Motor-Erregungssystem verwendet, als ein Generator auf derselben Welle wie der Motor installiert war (es ist auch ein Erreger), der Widerstände an die Feldwicklung angelegter Strom.
Der Rotor fast aller Synchron-Gleichstrommotoren wird ohne Erregerwicklung betrieben, und mit Permanentmagneten unterscheiden sie sich zwar im Prinzip von AC-LEDs, unterscheiden sich jedoch stark in der Art und Weise, wie sie von klassischen Dreiphasenmaschinen angeschlossen und gesteuert werden.
Eine der Hauptmerkmale eines Elektromotors ist eine mechanische Eigenschaft. Sie Synchronmotoren nahe einer geraden horizontalen Linie. Dies bedeutet, dass die Last auf der Welle ihre Drehzahl nicht beeinflusst (bis sie einen kritischen Wert erreicht).
 Asynchron- und b) Synchronmotoren")
Dies wird gerade durch Gleichstromerregung erreicht, daher hält ein Synchron-Elektromotor unter sich ändernden Lasten, Überlastungen und Spannungsabfällen (bis zu einem bestimmten Grenzwert) perfekt konstante Umdrehungen aufrecht.
Unten sehen Sie das Symbol im Diagramm der Synchronmaschine.

Rotordesign
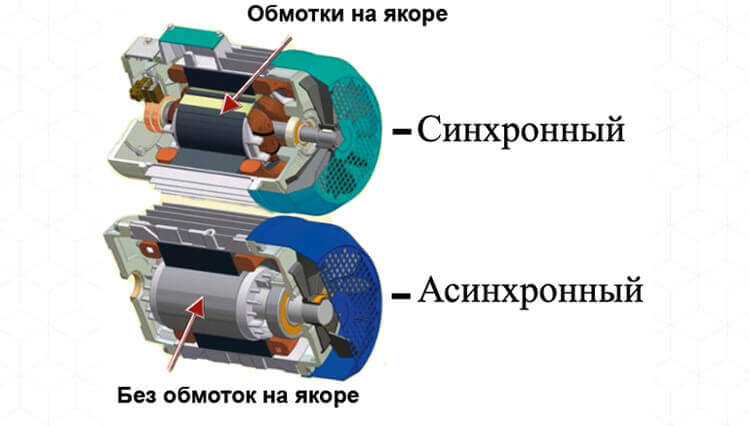
Ein synchroner Elektromotor besteht wie jeder andere aus zwei Hauptteilen:
- Stator. Die Wicklungen befinden sich darin. Es wird auch Anker genannt.
- Rotor. Darauf sind Permanentmagnete oder eine Erregerwicklung installiert. Es wird wegen seines Zwecks (Erzeugung eines Magnetfelds) auch als Induktor bezeichnet.
Um die Feldwicklung mit Strom zu versorgen, sind 2 Ringe am Rotor installiert (da die Erregung durch Gleichstrom erfolgt, wird einem von ihnen „+“ und dem anderen „-“ zugeführt). Am Bürstenhalter sind Bürsten angebracht.

Es gibt zwei Arten von Rotoren von Synchron-Wechselstrommotoren, je nach Verwendungszweck:
- Explizit polar. Pole (Spulen) sind deutlich sichtbar. Verwenden Sie bei niedrigen Geschwindigkeiten und einer großen Anzahl von Polen.
- Implizit - es sieht aus wie ein runder Rohling in dem Schlitz, auf den die Drähte der Wicklungen gelegt werden. Verwendung bei hohen Drehzahlen (3000, 1500 U / min) und einer kleinen Anzahl von Polen.

Synchronmotorstart
Ein Merkmal dieser Art von elektrischen Maschinen ist, dass sie nicht einfach mit dem Netzwerk verbunden werden können und auf ihren Start warten. Zusätzlich wird für den Betrieb der LED nicht nur die Quelle des Erregerstroms benötigt, sondern es gibt auch eine ziemlich komplizierte Anlaufschaltung.

Der Anlauf erfolgt wie bei einem Induktionsmotor, und um zusätzlich zur Feldwicklung ein Anlaufmoment zu erzeugen, wird am Rotor eine zusätzliche kurzgeschlossene „Käfigwicklung“ angebracht. Es wird auch als "Dämpfungswicklung" bezeichnet, da es die Stabilität bei plötzlichen Überlastungen erhöht.
Der Erregerstrom in der Rotorwicklung beim Start fehlt, und wenn er auf eine sub-synchrone Drehzahl beschleunigt (3-5% weniger als synchron), wird der Erregerstrom angelegt, wonach er und der Statorstrom schwingen, der Motor synchronisiert und in den Betriebsmodus wechselt.
Um die Anlaufströme leistungsfähiger Maschinen zu begrenzen, reduzieren sie manchmal die Spannung an den Klemmen der Statorwicklungen, indem sie einen Spartransformator oder Widerstände in Reihe schalten.
Während die Synchronmaschine im asynchronen Modus startet, sind Widerstände an die Feldwicklung angeschlossen, deren Widerstand den Widerstand der Wicklung selbst um das 5-10-fache übersteigt. Dies ist notwendig, damit der pulsierende Magnetfluss, der unter der Einwirkung der in der Wicklung während des Anlaufs induzierten Ströme entsteht, die Beschleunigung nicht verlangsamt und auch die Wicklungen aufgrund der darin induzierten EMK nicht beschädigt.
Spezies
Es gibt viele Arten solcher Maschinen. Die Konstruktion eines synchronen Wechselstrommotors mit Erregerwicklungen, wie sie in der Produktion am häufigsten verwendet wird, wurde oben beschrieben. Es gibt andere Arten, wie zum Beispiel:
- Permanentmagnet-Synchronmotoren. Dies sind verschiedene Elektromotoren wie PMSM - Permanentmagnet-Synchronmotor, BLDC - Brushless Direct Current und andere. Unterschiede zwischen denen bestehen in der Regelungsmethode und der Form des Stroms (sinusförmig oder trapezförmig). Sie werden auch als bürstenlose oder bürstenlose Motoren bezeichnet.Wird in Werkzeugmaschinen, ferngesteuerten Modellen, Elektrowerkzeugen usw. verwendet. Sie arbeiten nicht direkt mit Gleichstrom, sondern über einen speziellen Wandler.
- Schrittmotoren - bürstenlose Synchronmotoren, bei denen der Rotor genau die angegebene Position einnimmt, dienen zur Positionierung des Arbeitswerkzeugs in den CNC-Maschinen und zur Steuerung verschiedener Elemente automatischer Systeme (z. B. der Position der Drosselklappe im Fahrzeug). Sie bestehen aus einem Stator, in diesem Fall befinden sich Erregerwicklungen darauf, und einem Rotor, der aus magnetisch weichem oder magnetisch hartem Material besteht. Strukturell sehr ähnlich zu den vorherigen Typen.
- Reaktiv.
- Hysterese.
- Reaktive Hysterese.
Die letzten drei Arten von LEDs haben ebenfalls keine Bürsten, sie funktionieren aufgrund des speziellen Designs des Rotors. Reaktive LEDs unterscheiden drei ihrer Konstruktionen: einen quer geschichteten Rotor, einen Rotor mit unterschiedlichen Polen und einen axial geschichteten Rotor. Eine Erklärung des Prinzips ihrer Arbeit ist ziemlich kompliziert und wird viel Zeit in Anspruch nehmen, daher werden wir sie weglassen. Solche Motoren treffen Sie in der Praxis wahrscheinlich selten. Dies sind hauptsächlich Maschinen mit geringem Stromverbrauch, die in der Automatisierung eingesetzt werden.

Anwendungsbereich
Synchronmotoren sind teurer als Asynchronmotoren, außerdem benötigen sie eine zusätzliche Gleichstromquelle - dies verringert teilweise die Breite des Anwendungsbereichs dieser Art von elektrischen Maschinen. Synchronelektromotoren werden jedoch verwendet, um Mechanismen anzutreiben, bei denen Überlastungen möglich sind und eine genaue Aufrechterhaltung stabiler Umdrehungen erforderlich ist.

Darüber hinaus werden sie am häufigsten im Bereich großer Kapazitäten eingesetzt - Hunderte von Kilowatt und Einheiten von Megawatt, und gleichzeitig sind Starten und Stoppen eher selten, dh die Maschinen arbeiten lange Zeit rund um die Uhr. Diese Anwendung beruht auf der Tatsache, dass Synchronmaschinen mit cos Ф phi nahe 1 arbeiten und Blindleistung an das Netzwerk liefern können, was den Leistungsfaktor des Netzwerks verbessert und dessen Verbrauch verringert, was für Unternehmen wichtig ist.
Vor- und Nachteile
Mit einfachen Worten, dann hat jedes Elektroauto seine Vor- und Nachteile. Die Vorteile eines Synchronmotors sind:
- Arbeiten Sie mit cosPhI = 1, da sie aufgrund von Gleichstromanregung keine Blindleistung aus dem Netzwerk verbrauchen.
- Während des Betriebs geben sie mit Übererregung Blindleistung an das Netz ab, wodurch der Leistungsfaktor des Netzes, der Spannungsabfall und die Verluste darin verbessert werden und der CM der Generatoren von Kraftwerken zunimmt.
- Das auf der Welle der LED entwickelte maximale Moment ist proportional zu U und für AD - U² (quadratische Abhängigkeit von der Spannung). Dies bedeutet, dass die LED eine gute Tragfähigkeit und Stabilität aufweist, die während eines Spannungsabfalls im Netzwerk erhalten bleiben.
- Infolgedessen ist die Drehzahl bei Überlast und Absenkung innerhalb der Überlastkapazität stabil, insbesondere bei zunehmendem Erregerstrom.
Ein wesentlicher Nachteil eines Synchronmotors besteht jedoch darin, dass sein Aufbau komplizierter ist als der eines Asynchronmotors mit einem kurzgeschlossenen Rotor, und es wird ein Erreger benötigt, ohne den er nicht arbeiten kann. All dies führt zu höheren Kosten im Vergleich zu Asynchronmaschinen und zu Schwierigkeiten bei Wartung und Betrieb.
Vielleicht enden dort die Vor- und Nachteile von Synchronmotoren. In diesem Artikel haben wir versucht, allgemeine Informationen zu Synchronmotoren zusammenzufassen. Wenn Sie etwas haben, um das Material zu ergänzen, schreiben Sie in die Kommentare.
Verwandte Materialien: